先日、アマゾンをブラブラしてたら、そこそこ安いバイク用汎用メーターを見つけた~
WR250Xは、タコメーターが無いので、回転を上げるのに気を使うから、前からタコメーターが欲しかったが、中々良い物が無い・・
※当然ながら、高くて良いものはあるにはあるが・・・
このメーターは6000円くらい(現在は4800円?)で、スピード、水温、ガソリンゲージ、各種インジケーターなど機能も豊富で、そして、意外と薄くてコンパクト(ここ大事)
~少し悩んだが、駄目元で、買ってみた。
先日届いて、早速開封したが、解説書の類が全く入って無いではないか・・・

流石中華クオリティーだけの事はある~、関心している場合では無い、まぁ、この程度は、端から予想していた範疇なので、慌てる事なく、ネットの海へ・・・
でも、中々、目的の情報にたどり着かない・・・
ふと、裏に型番が刻印してある「SS182」うーーん、一応これで検索・・・
おお!一発で、それらしい情報がーーー、流石 google 先生!、凄いです!
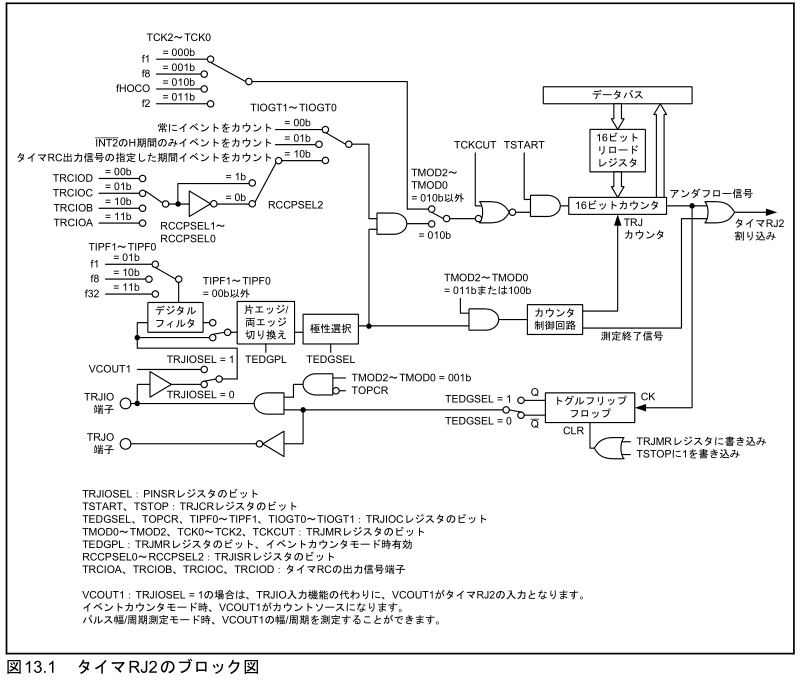
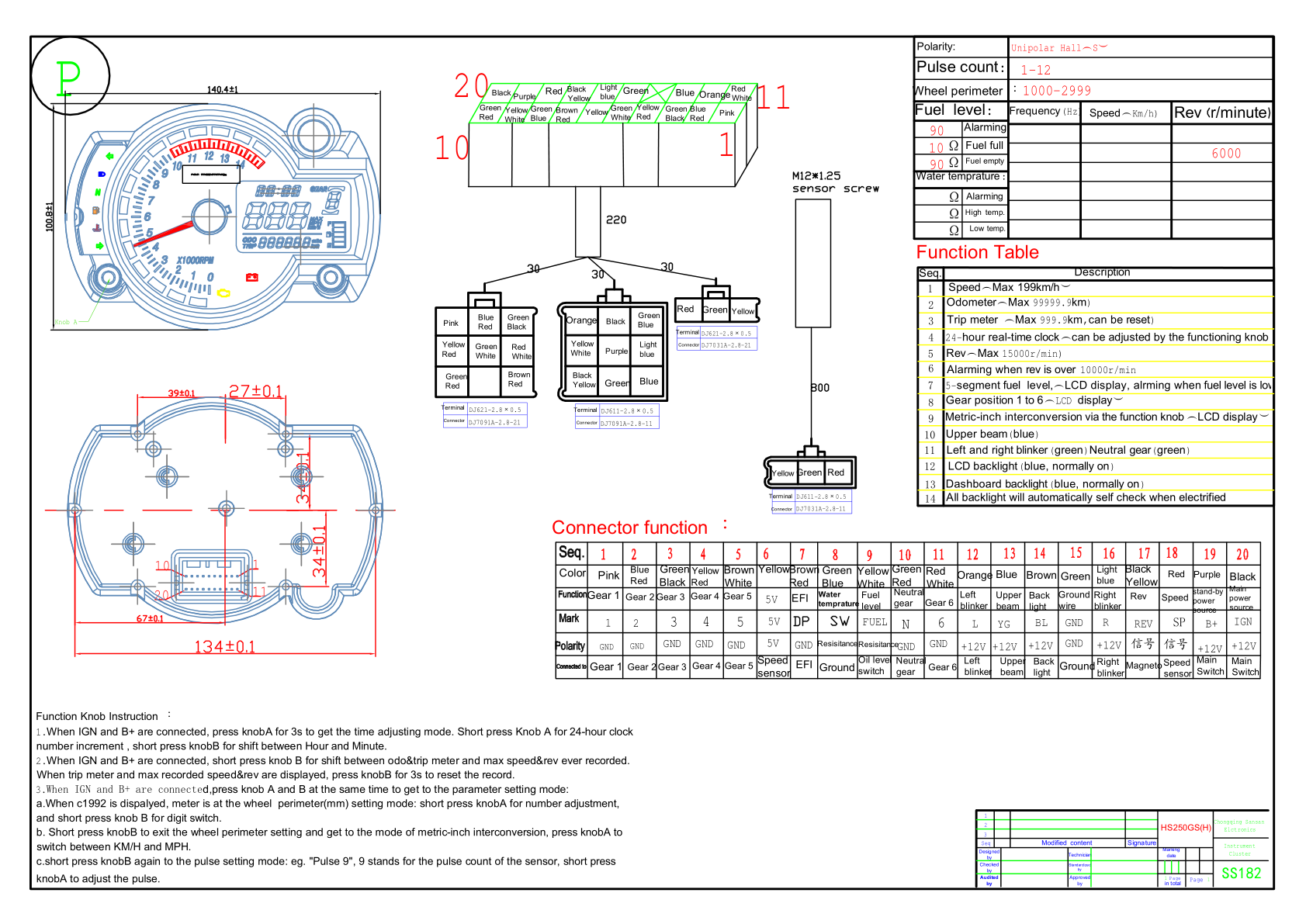
1: Pink Gear 1 (GND) 2: Blue/Red Gear 2 (GND) 3: Green/Black Gear 3 (GND) 4: Yellow/Red Gear 4 (GND) 5: Brown/White Gear 5 (GND) 6: Yellow 5V (Speed sensor) ※速度センサーに供給する+5V電源出力 7: Brown/Red EFI (GND) 8: Green/Blue Water temprature (Resisitance) 抵抗入力 9: Yellow/White Fuel level (Resisitance) 抵抗入力 10: Green/Red Neutral gear (GND) ニュートラルランプ 11: Red/White Gear 6 (GND) 12: Orange Left blinker (+12V) ウインカー左 13: Blue Upper beam (+12V) ハイ・ビーム 14: Brown Back light (+12V) ※中継コネクターに接続されていない、常に点灯 15: Green GND 16: Lightblue Right blinker (+12V) ウインカー右 17: Black/Yellow Rev (signal) エンジン回転計用パルス信号入力 18: Red Speed (signal) 速度センサーパルス入力 19: Purple Stand-by power source (+12V) スタンバイ電源(常時接続) 20: Black Main power source (+12V) 電源(イグニッション)
※一応、「解説書を送って!」と販売元に連絡しておいたら、PDFで1枚の説明が送られて来たので、ここに貼っておく。
で、何とか、結線のイメージは沸いたのだが、とりあえず、どんなもんかテストしてみた。
(1)まず、電源を入れてみる。
・19、20を+12Vに
※19番は、内部時計などを活性させておくのに常時バッテリーに接続しておくんだろうと思うけど、どのくらい電気食うか、少し不安材料だよなー、なにしろ中華クオリティーなので・・
・15をGNDに
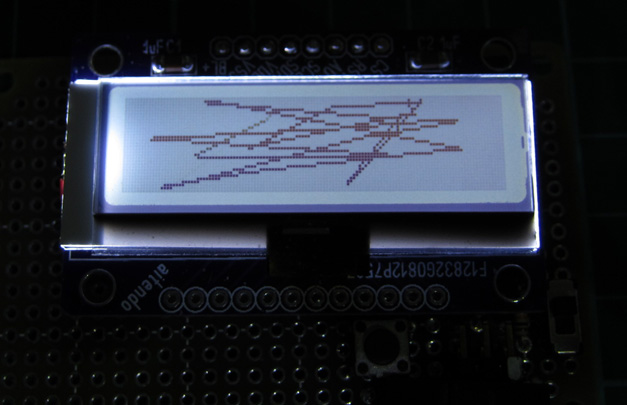
※電源投入時オープニング
※お約束、ステッピングモーター式、最近の感じ~
※この感じなら、6000円なら「買い!」なのではないかと~
(2)基本機能
・アナログメーターによるエンジン回転表示
※10000rpmからレッドゾーン(固定)で右上の赤いランプが点灯
※最大15000rpm
※最高回転を自動で記録するようだ
※1、2、4気筒を設定できる
・デジタル速度表示
※最高速度を記録するようだ
※キロメーター、マイルの表示切替
※タイヤが1回転した時の長さと、1回転辺りのパルス数を設定できる
・オドメーター、トリップメーター
・リアルタイムクロック(バックアップ電源を常時接続する必要がある)
・抵抗式による燃料計表示(液晶表示による)
・燃料警告ランプ
・抵抗式による水温警告ランプ
・ニュートラルランプ
・左右ウインカーランプ
・ハイビームランプ
・液晶表示によるギアポジション(1~6)
・EFI警告ランプ(メーター中央下側)
・バッテリー警告ランプ(メーター中央下側右寄り)
※バッテリーの電圧がある程度下がると点灯するものと思われる
(3)各種ランプと、対応を調査
・Gear 1,2,3,4,5,6 はギアポジションを表示するもので、それぞれの端子をGNDに繋ぐ事で液晶画面に表示する。
※この機能必要かなぁ・・、最近のインジェクション車とかは、ギアポジションを観て、エンジンの特性を変えるとかしてるのもあるのだが、大抵は、ポジションにより抵抗が変化する仕組みと思うので、このままでは、上手く適合しないと思うけど・
・EFI は、エンジンや、EFIのトラブルなどで表示するランプ、これも GND 接続
・Left/Right blinker は、ウインカー用で、+12V で点灯する
・Neutral gear は、ギアポジションをニュートラルに入れた時に点灯する +12V
・Upper beam は、ハイビーム時に点灯 +12V
・14: Back Light は接続されてなくて、多分常時点灯なのだと思う
-----
付属品として、磁力に反応するごついセンサーが同梱されていたが、これは、使えないなぁー、自分で作る予定。
今回はここまで、続きは、次回~