RX65Nには、描画をブーストするDRW2D描画エンジンがある。
DRW2Dの基本的な動作は、メモリー上に描画コマンド・リストを定義しておき、その先頭ポインタを描画エンジンに渡す事で描画を行う仕組みとなっている。
描画状況により、割り込みが起動でき、DRW2Dライブラリでは、標準的に割り込みサービスを呼び出すように設計されている。
「drw2d_mgr」クラスでは、初期化で、割り込みベクターを登録している。
extern "C" {
extern void drw_int_isr(void);
};
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief DRW2D 制御/マネージャー
@param[in] DRW DRW2D クラス
@param[in] XSIZE X 方向ピクセルサイズ
@param[in] YSIZE Y 方向ピクセルサイズ
@param[in] PXT ピクセル・タイプ
*/
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
template <class DRW, int16_t XSIZE, int16_t YSIZE, glcdc_def::PIX_TYPE PXT>
class drw2d_mgr {
...
icu_mgr::install_group_task(DRW::get_irq_vec(), drw_int_isr);
...
};DRW2Dの初期化は、以下のように行うようで、「drw2d_mgr」クラスの初期化「start();」から呼んでいる。
d2_ = d2_opendevice(0);
d2_inithw(d2_, 0);
rb_ = d2_newrenderbuffer(d2_, dlis, stsz);「d2_newrenderbuffer」のプロトタイプは以下のようになっている。
DRW2DライブラリのAPIは非常に豊富に用意されているが、とりあえず、良く使いそうな物だけラップした。
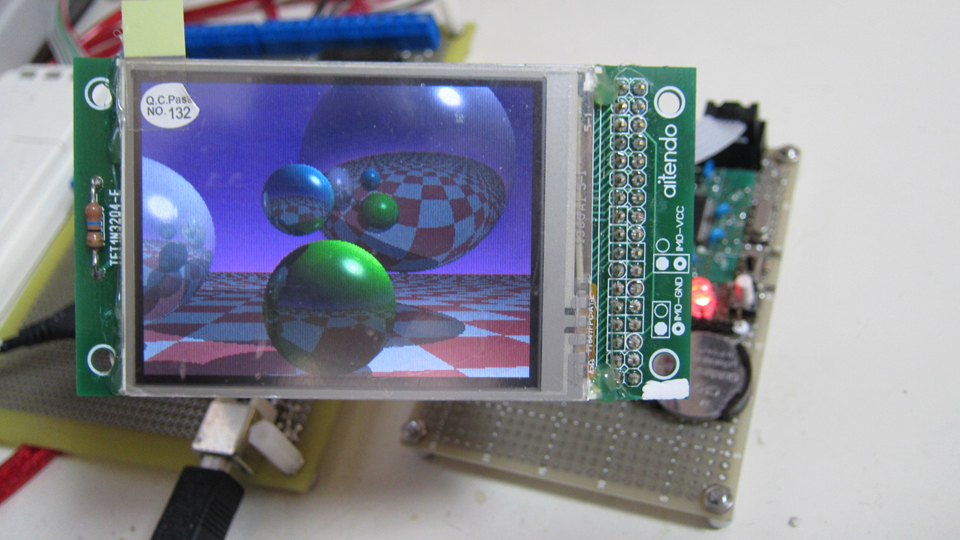
アンチエリアスされた「線」と「サークル」の描画 とりあえず、基本が出来たので後は、スプライトなどテクスチャーの描画などだ、フォントが一通り描画できるようになったら、ソフトウェアーのエンジンと入れ替えたい・・・drw2d_mgr.hpp