この記事はC++ Advent Calender 2014の参加記事です。
感覚的には、組み込み関係の業界では、C++の取り組みはかなりお寒いものがあります。
現代の組み込みでは、32ビットCPU、FPU内蔵、100MHz動作、そんなデバイスが539円、gcc で開発でき、もちろんC++を使えます、STLやboostは限定的に使えます。
※メモリーが少ないので、メモリーを多く必要なライブラリーに起因したクラスは使えません(たとえば、iostream 関係は、非常に多くメモリーを消費する為、デバイスによっては使えません)
去年は「WinAVR C++ の実力とは!?」を書きました。
AVRマイコンは8ビットのRISCマイコンで、扱えるリソースが少ない為もあり、STLが使えないなど制限がありました。
今回は、ルネサス エレクトロニクスの32ビットマイコンであるRX600シリーズで、C++の開発環境や、C++で実装するI/O定義クラスの紹介をしたいと思います。
RX621マイコンボード
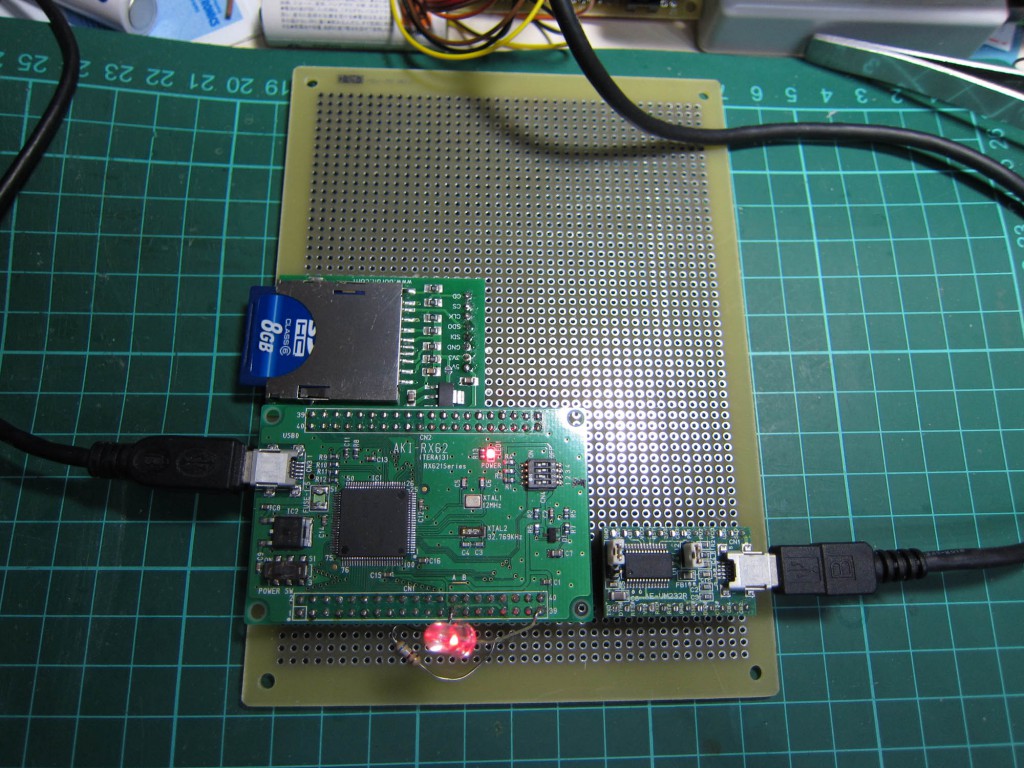
・搭載マイコン:R5F56218BDFP(32ビットRXコア)
・プログラム用フラッシュメモリ:512Kバイト
・データ用フラッシュメモリ:32Kバイト
・RAM:96Kバイト(ノーウェイト動作)
・動作周波数:96MHz(12MHzをPLLにより8逓倍動作)
RXマイコンは、CISC型の32ビットマイコンで、低消費電力、安価、高機能、高速など、色々なメリットがある国産のマイコンです。
組み込み系マイコンと言えば、ARMの人気がもの凄く高く、色々なメーカーが採用している為、バリエーションも多く価格も安く、開発環境も整っていると言えるでしょう。
しかしながら、RXマイコンは、自分が評価した価格ゾーンでは、ARMより多くのメリットがあると感じます。
日本のメーカーにエールを送りたいとゆーのもありますが、コストが同じ程度なら、性能、入手性、日本語マニュアルなど、より扱いやすい物を使う方が効率が良いと感じます。
それでも、本当はARMの方が優位だとは思いますが、天邪鬼なんでRX押しです!www
開発環境:
ルネサスでは、開発ツールとして、自社開発の統合開発環境を用意しており、無料版(64キロバイト以上のバイナリーを作れない)もあります。
又、GNUを使った無料の統合開発環境「KPIT」も使う事が出来ますが、ルネサス提供のサンプルプログラムをコンパイル出来ないなど、冷遇されており、自分のようにコマンドラインで、コンパイラ、リンカー、Makefile、emacs で開発を進めるスタイルにも合いません。
・統合開発環境では多くの場合、裏で、目に見えない「何か」をやっており、「つぶし」が利かない。
・サターンの時代(SH2)に、自社開発のコンパイラを使った経験から、あまり良い印象が無いので、最初から使う気にもならず評価もしていません。
・新しい統合開発環境の操作を学ぶのに時間がかかる。
・少し大きなプログラムを作ったら、簡単に64キロバイトを超えてしまい、有料版ツールが必須になるが、数十万円の開発ツールは買う気にはなりません。
・ gcc ならソースコードを取ってきて、自分でコンパイルすれば、RX用の gcc を使う事が出来ます。
・自分で開発環境を用意する場合、デバッグ環境も自分で整えなければなりませんが、そこは、経験とアイディアで乗り切りますwww
・マイコンのフラッシュメモリーにプログラムを書き込むツールは、無料版があり(Windows環境のみ)こちらは、大きな制限はありません。
・メーカー専用のコンパイラは、gcc より、進んだ最適化が出来るとか言いますが、非常に限られた場合の評価しか宣伝していない為、懐疑的です。
・メーカー製IDEの良い部分としては、J−TAGプローブなどで行うリアルタイムのデバッグ環境などです。
マイコン用クロス開発用 gcc のビルドは、以下の3つのバージョンがマッチしないと、コンパイルに失敗する場合があります。
RXマイコンの場合、最新版は、以下の3つの組み合わせになるようです。
GCC 4.8.3
Binutils 2.24
Newlib 2.1.0
※まだ、自分は4.7.3を使っているので、試していません。
Windows の cygwin 環境では、コンパイルを通す為には、色々なオプションを付ける必要があるようで、大抵標準のオプションだけではコンパイルに失敗します。
又、コンパイルに必要な、ツールのバージョンにも影響するようで、再現性に乏しく困難なので、最近は MSYS(MinGW) でコンパイルしています、こちらは、比較的普通にコンパイルに成功します。
MacOSやLinuxでは、何の苦労も無くコンパイル出来ます、ただし、デバイス内臓のフラッシュROMに書き込むツールが対応していないので、現実的には Windows を使う事になります、現在、コマンドラインから、フラッシュへ書き込むプログラムを独自開発している最中です。
組み込みマイコン用の gcc が、PCの gcc と違う点は、スタートアップルーチンをデバイス毎に用意する必要があり(デバイスによって、持っているRAM、ROMのサイズが違い、初期化を行う方法が異なっているのが普通です)、多少複雑です、マイコンの場合、コールドスタートした状態では、割り込みは禁止され、最低限の設定状態で起動しています。
なので、最初に行うべきは、デバイスの必要な部分を初期化して、スタックや、記憶割り当てが使うメモリーの領域設定、C++の場合は、静的なクラスのコンストラクターを呼び出して初期化するなど、行う必要があります。
rx-elf/lib/rx.ld
RX用 gcc をビルドしたら、上記パスに、スタートアップに必要なファイルが用意されています。
「rx.ld」は、リンカースクリプトで、データセクション、プログラムセクション、など、初期化が必要な領域、初期化を必要とするクラスのコンストラクターやデストラクターのエントリーテーブルなど必要なリンク情報が入っています。
また、リンカースクリプトで、デバイスに適合するRAMやROM領域のアドレスを指定します。
以下は、リンカースクリプトの一部です。
OUTPUT_ARCH(rx)
ENTRY(_start)
MEMORY {
RAM(rwx) : org = 0x00000000, len = 0x00002000
ROM(rx) : org = 0xFFFF0000, len = 0x00010000
}
SECTIONS {
_usp_init = 0x00001f00;
_isp_init = 0x00002000;
.fvectors 0xFFFFFFD0 : {
vect.o(.fvectors)
}
...
※ハードウェアーベクターテーブルの指定もあります。
マイコンは電源が入るとリセット信号がアサートされ、ハードウェアーベクターにあるリセットベクター先に飛び、プログラムを開始します。
以下はスタートルーチンで、マイコン独自の命令を実行する為、アセンブラで記述してあります。
※この部分だけはアセンブラを使う必要があります。
.global _power_on_reset
_power_on_reset:
.global _start
_start:
# スタックの設定
.extern _usp_init
mvtc #_usp_init, usp
.extern _isp_init
mvtc #_isp_init, isp
# 割り込みベクタの設定
.extern _interrupt_vectors
mov.l #_interrupt_vectors, r5
mvtc r5,intb
mov.l #0x100, r5
mvtc r5,fpsw
# Iレジスタを設定し、割り込みを許可する
mov.l #0x00010000, r5
mvtc r5,psw
# PMレジスタを設定し、ユーザモードに移行する
mvfc psw,r1
or #0x100000, r1
push.l r1
# UレジスタをセットするためにRTE命令を実行する
mvfc pc,r1
add #0x0a,r1
push.l r1
rte
nop
nop
# init() 関数から開始
.extern _init
bsr _init
.global _set_intr_level
_set_intr_level:
and #15,r1
shll #24,r1
or #0x100000,r1
mvtc r1,psw
rts
nop
.global _exit
_exit:
wait
bra _exit
これは、「init.c」で、main に飛ぶ前に行う初期化を含んだものです。
※RXマイコンでは割り込みベクターのベースアドレスを変更できるので、自分のシステムでは、利便性を考慮して、RAM上に置いてあります。
int main(int argc, char**argv);
extern int _datainternal;
extern int _datastart;
extern int _dataend;
extern int _bssstart;
extern int _bssend;
extern int _preinit_array_start;
extern int _preinit_array_end;
extern int _init_array_start;
extern int _init_array_end;
extern void (*interrupt_vectors[256])(void);
extern void null_task_(void);
int init(void)
{
// 割り込みベクターテーブルの初期化
for(int i = 0; i < 256; ++i) {
interrupt_vectors[i] = null_task_;
}
// R/W-data セクションのコピー
{
int *src = &_datainternal;
int *dst = &_datastart;
while(dst < &_dataend) {
*dst++ = *src++;
}
}
// bss セクションのクリア
{
int *dst = &_bssstart;
while(dst < &_bssend) {
*dst++ = 0;
}
}
// 静的コンストラクターの実行(C++ )
{
int *p = &_preinit_array_start;
while(p < &_preinit_array_end) {
void (*prog)(void) = (void *)*p++;
(*prog)();
}
}
{
int *p = &_init_array_start;
while(p < &_init_array_end) {
void (*prog)(void) = (void *)*p++;
(*prog)();
}
}
// main の起動
static int argc = 0;
static char **argv = 0;
int ret = main(argc, argv);
return ret;
}
これで、main から実行でき、後は、通常のアプリケーションとほぼ同じとなります、最低限これだけあれば、後は、工夫次第で何とでもなります。
※リンカーで、独自のリンカースクリプトを使い、標準のスタートアップを行わないので、「-nostartfiles」を指定します。
最低限のデバッグとして、シリアルインターフェースを繋いで、ターミナルで文字の入出力が必要な場合、stdin、stdout に相当する部分を実装する必要があります。
RX63Tでは無理ですが、RX621では、それらの実装で、iostreamクラスを使え、通常のPCアプリとほぼ遜色無く動作します。
※PCでは、メモリーの消費はあまり気にしませんが、組み込みでは、注意する必要があります。
I/O定義:
組み込みマイコンでのデバイスドライバーに相当する部分は、通常は、Linux のようなシステムとは違い、カーネルによるしばりは無く、自由に直接プログラム出来ます。
であるにも係わらず、未だに、「C」でプログラムする事が当たり前のような状況になっています。
デバイスメーカーが提供するサンプルプログラムも、C++で作られたのは見た記憶がありません。(ARMではあるようです)
※それ以前に、サンプルプログラムの品質が低いと感じます。
趣味で、組み込みマイコンのプログラムをする場合でも、C++は敬遠されている感じがします。
さて、組み込みマイコンでは、I/O(シリアルコミュニケーション、A/D 変換、ポートなど)の操作を直接行いますが、最近のI/Oは高機能で、非常に多くの機能があります。
定義は複雑で肥大化しており、マイコンのバリエーションにより、機能が微妙に異なったりする場合もあります、もはや、一つのヘッダーでは、管理できないと思われます。
たとえば、ルネサスは、マイコン内のI/Oの機能を定義したヘッダーを提供していますが、これは、処理系依存で実装されている為、gcc でそのまま使う事は出来ません。
また、基本的に「C」言語を想定した定義なので、C++でプログラミングしたい場合にあまりメリットがありません。
これは、RX62Nの定義ヘッダーの一部です(A/D変換の部分です)
struct st_ad {
unsigned short ADDRA;
unsigned short ADDRB;
unsigned short ADDRC;
unsigned short ADDRD;
char wk0[8];
union {
unsigned char BYTE;
struct {
unsigned char :1;
unsigned char ADIE:1;
unsigned char ADST:1;
unsigned char :1;
unsigned char CH:4;
} BIT;
} ADCSR;
union {
unsigned char BYTE;
struct {
unsigned char TRGS:3;
unsigned char :1;
unsigned char CKS:2;
unsigned char MODE:2;
} BIT;
} ADCR;
union {
unsigned char BYTE;
struct {
unsigned char DPSEL:1;
} BIT;
} ADDPR;
unsigned char ADSSTR;
char wk1[11];
union {
unsigned char BYTE;
struct {
unsigned char :6;
unsigned char DIAG:2;
} BIT;
} ADDIAGR;
};
ビットフィールドが使われています、これは、処理系依存で、gcc では、LSB、MSBが逆になります。
また、最適化した場合に、適切なビット幅のアクセス(32ビットのI/Oに8ビットのアクセスなど)が行われない場合があり、RO(リードのみ)、WO(ライトのみ)などの表現も無く、読みにくく、使いやすいとは言えないと思います。
そこで、C++をもっと積極的に使って定義ファイルを作ったらどうかと考えます。
下の実装は、上のビットフィールドから、テンプレートを使った実装です。(少し冗長な部分があります)
//=====================================================================//
/*! @file
@brief RX62N, RX621 グループ・AD 定義 @n
Copyright 2013 Kunihito Hiramatsu
@author 平松邦仁 (hira@rvf-rc45.net)
*/
//=====================================================================//
#include "io_utils.hpp"
namespace device {
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief AD 定義
@param[in] base ベース・アドレス
*/
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
template <uint32_t base>
struct ad_t {
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief ADDRA レジスタ
*/
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
io16<base + 0x00> ADDRA;
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief ADDRB レジスタ
*/
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
io16<base + 0x02> ADDRB;
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief ADDRC レジスタ
*/
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
io16<base + 0x04> ADDRC;
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief ADDRD レジスタ
*/
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
io16<base + 0x06> ADDRD;
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief ADCSR レジスタ
*/
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
typedef io8<base + 0x10> adcsr_io;
struct adcsr_t : public adcsr_io {
using adcsr_io::operator =;
using adcsr_io::operator ();
using adcsr_io::operator |=;
using adcsr_io::operator &=;
bits_t<adcsr_io, 0, 4> CH;
bit_t<adcsr_io, 5> ADST;
bit_t<adcsr_io, 6> ADIE;
};
static adcsr_t ADCSR;
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief ADCR レジスタ
*/
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
typedef io8<base + 0x11> adcr_io;
struct adcr_t : public adcr_io {
using adcr_io::operator =;
using adcr_io::operator ();
using adcr_io::operator |=;
using adcr_io::operator &=;
bits_t<adcr_io, 0, 2> MODE;
bits_t<adcr_io, 2, 2> CKS;
bits_t<adcr_io, 5, 3> TRGS;
};
static adcr_t ADCR;
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief ADDPRA レジスタ
*/
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
typedef io8<base + 0x12> addpra_io;
struct addpra_t : public addpra_io {
using addpra_io::operator =;
using addpra_io::operator ();
using addpra_io::operator |=;
using addpra_io::operator &=;
bit_t<addpra_io, 7> DPSEL;
};
static addpra_t ADDPRA;
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief ADSSTR レジスタ
*/
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
static io8<base + 0x13> ADSSTR;
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
/*!
@brief ADDIAGR レジスタ
*/
//+++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++//
typedef io8<base + 0x15> addiagr_io;
struct addiagr_t : public addiagr_io {
using addiagr_io::operator =;
using addiagr_io::operator ();
using addiagr_io::operator |=;
using addiagr_io::operator &=;
bits_t<addiagr_io, 0, 2> DIAG;
};
static addiagr_t ADDIAGR;
};
typedef ad_t<0x00088040> AD0;
typedef ad_t<0x00088060> AD1;
}
※io_utils.hppは、git にありますので参照の事。
今までにこのような取り組みは多少あり、同じような考えによる実装はいくつか参考にした事がありますが、不満な部分などがあり、結局自分で考えて実装したものです。
・ビットと機能の対比がわかりやすい。
・8、16、32ビットアクセス、RO、WO、RWを表現できる。
・最適化レベルに関係無く、厳密なアクセスを行える。
・エンディアンに依存しない。
・処理系に依存しない。(実際は gcc 以外で試していませんが、x86 の clang でシュミレーターで実験しています)
・最適化されたアセンブラソースを確認して、これなら満足できると思う。
※但し、レビューもされていませんし、もっと良い方法、適切な実装があるかもしれません。
※参照RX、I/O関係
※RO、WO、RWを分ける必要があるので、読み出しの場合は、()オペレーターを使っています。
クラス化した事で色々な恩恵を受けられます。
たとえば、シリアルコミュニケーションは、通常複数チャネルがありますが、I/O部分のアクセスをクラス化した事で、かなりスッキリ書けるようになり、異なったチャネルの操作もテンプレートで簡単に記述できるようになりました。
I/O操作をC++で書けると何がありがたいかと言うと、テンプレートが使える事で、微妙な違いを、隠蔽して、判りやすくて使いやすい入出力クラスをシンプルに書けます。
組み込みでC++を使うべき理由の一つです。
最後に:
組み込みの世界では、何故か、C++が敬遠される傾向にあると感じがしますが、C++こそ、組み込みに適した言語と思えてなりません。
これらRXマイコン関連の成果は、以下のリンクで公開していますので、興味ある人はどうぞ。
RX関係ソースコード