WR250X の ETC 取り付けに伴う困難
最近、地元のバイク乗りと仲良くなり、ツーリングに出かける事になったのだけど、自分のバイクには ETC車載機を取り付けて無いので、高速に気軽に乗れない
それと、近年、ETC専用ゲートなども増えたし、スマートインターでの利用を考えると、ETCが無いと、色々と不便でもある
※大月の隣、上野原IC は、最近 ETC専用になった
自分は、バイクでは、あまり高速の利用はしないのだが、日帰りで少し遠出する場合には、使う必要性も出てくる
我々くらいの年齢のバイク乗りになると、峠だけに集中したツーリングはしないw
普通に、高速を使って、ゆったり走って、時間を節約し、明るいうちに戻ってくるものだw
そこで、以前に ZRX1200R(廃車している)に付けていた ETC車載機を、WR250X に移植する事にしたのだが、WR250X 乗りならご存じだが、このバイクには ETC車載機を組み込むスペースがほぼ無い
普通、外装に ETC車載機を入れる小さなバッグを取り付けて、その中に入れるとか、アンテナ一体式の車載器をハンドル付近に取り付けるなどの方法を採用するようだが、どう考えてもスマートとは言えないし、車載機が直で見えるのは良くないと思っている
エンジンの近くなら、何とか取り付け出来そうなスペースもあるが、熱で、壊れるかもしれず、どうしようか、考えた挙句、灯台下暗しと言うか、意外な場所にギリギリスペースがある事に気がついた
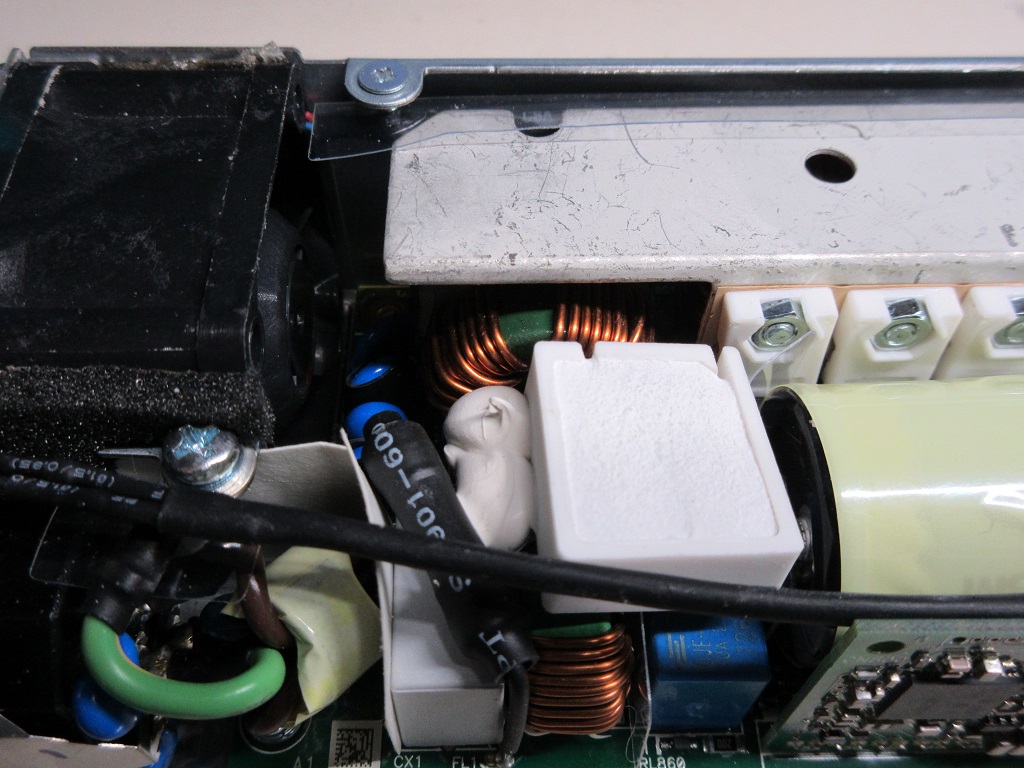
以前に、バッテリーを、LiFePO4 系リチウムバッテリーに交換したのだが、純正の鉛シールドバッテリーに比べて小さいので、その余ったスペースを利用して ETC 車載機を置く事が出来るのではないかと考えた
実際、やってみると、多少、サイドカウルの収まりが悪くなるものの、十分許容できる事が判った
バッテリーケースは、車載器に少し当たるので、一部削った
ただ、ETC カードを取り出す際は、サイドカウルを外す必要があるのだが、サイドカウルは、ネジ1本で止まっているだけなので、意外と簡単だし、バイク専用の ETC カードを用意しておけば済む話でもある
ウインカーリレーの修正と ETC の電源
以前に ウインカーを LED 化した
この記事では、上手くいっている事になっているが、実際には、エンジンを始動して、アイドリングしている状態だと、点滅が少し速くなる
(ハイフラッシャー的な・・)アクセルを少し開けて回転を上げると、通常の点滅になる
※アイドリング時、発電電圧が少し高くなるものと思うが、これは、レギュレーターの仕様と関係しているし、かなり微妙な症状だと思う
直そう、直そうと思っていたが、面倒だし、点滅はしていたので、そのままにしていた・・・
今回、ETC 取り付けで、電源をどこから取るか、色々考えたが、配線図を眺めると、ウインカー、ヘッドライト、が同一の電源になっていて
+電源が、ウインカーリレーの片側に来ている
※配線図は、サービスマニュアルに記載されているが、英語版のマニュアルは、ネットで見つける事が出来る
そこで、そこから、電源を取る事にして、ハーネスを調べたが、メインハーネスから分岐しているコードが短く、ハーネスから分岐させるのは、難しいと判った、それに、ハーネスを切ったり貼ったりするのは、何だが気が進まない・・・
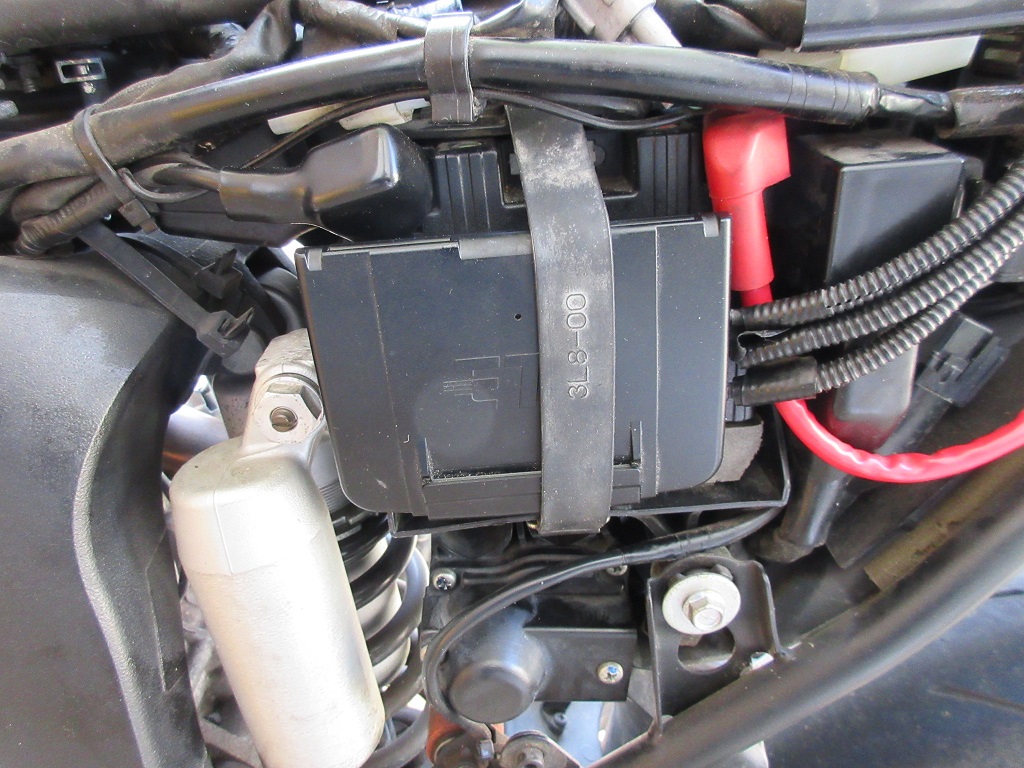
そこで、ウインカーリレーを分解して、+側の端子の根本に直接コードをハンダ付けして、取り出した
ウインカーリレーから、1本コードが出ているが、そんなに邪魔にならないし、いつでも綺麗に外せる
※このライト系電源は、ウインカーを LED 化して、さらに、ヘッドライトも LED 化しているので、電力的に十分な余裕がある(15Aのヒューズがあるライン)
※ETC 車載機の電源ラインには 1A のヒューズが付いている(実際の消費電流は、もっと少なく、0.2A も食わないと思う)
ウインカーリレーを改造したので、ついでに、点滅速度の改善も行った、今まで、内部回路に 470K オームの抵抗を直列に入れていたが、100K オーム足してみた
すると、今度は、アイドリング時でも、点滅速度が速くなる事は無くなった
※もし、同じように改造をするなら、560K とかにすれば良いだろうと思う

アンテナとインジケーターの取り付け


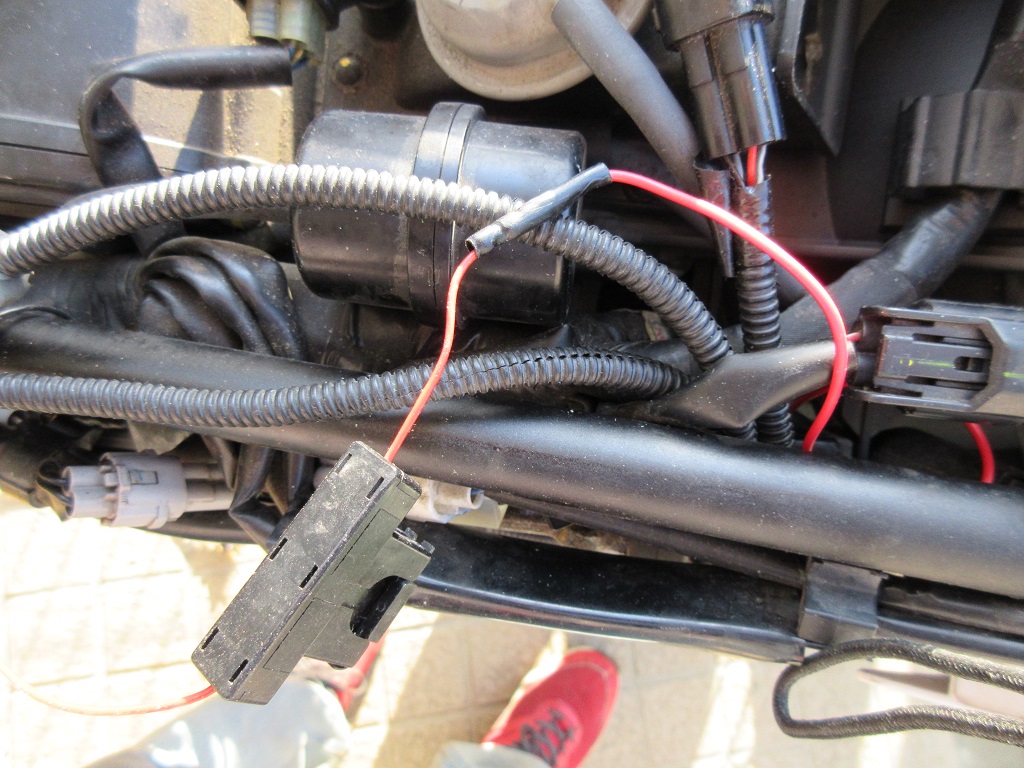
電源が何とかなったので、アンテナとインジケーターをかなり適当だが取り付けた、今後、もっとちゃんと固定しようと思う
配線は、左のカウルを外して、燃料タンクの下とフレームの隙間に通して、主要な部分は、タイラップで固定した
アンテナの角度は20度なので、目分量で、少し斜めに取り付けてある
インジケーターは、キーONで、赤と緑が点滅して、カードの読み取りが正常なら、緑の点灯になる
ETC車載機は、何年も、通電もしない状態だったので、取り付け後、上野原から談合坂を走ってみて簡単なテストを行ったが、問題無かった~
ついでにエアーフィルターの整備
そーいえば、エアーフィルターを数年は掃除していなかった、さぞかし汚れているだろう・・・
WR250 は、何故か、エアーフィルターが、スポンジによる湿式になっていて、一般的な「紙」による交換式では無い
まぁ、湿式は、灯油などで洗って、何度でも使えるのだけど
とりあえず、エアーボックスを開けてみた・・・

加水分解して、ボロボロになっていて、元の姿が無い・・・
この状態だと、インジェクションとはいえ、相当に薄い状態だったものと思う・・・
そして、埃を吸い放題・・・

しかし、心配いらない、こんな事もあろうかと、以前にちゃんと新品を買っておいたw、スポンジに塗るオイルも専用品を買っておいたー

ボロボロになったスポンジを取り除くのが、それなりに大変だったが、新品に交換したー
スポンジに塗るオイルは、ハチミツみたいな粘度で、ネバネバしていて、どの位染み込ますのか、要領が判らなかったが、多くも無く、少なくも無く、まんべんなく塗りたくった
※社外製紙式エアーフィルターは販売されているようだが、かなり割高のようだー