まだ、機能的に欠けている部分もあるし、あまりにヒドイ実装の部分もあり、
手直しをしたいのだがーとりあえず、書き込み、読み出し、消去など、一通り
の機能は揃っているので、この辺で、ライタープログラムは、止めて、
R8C本体のプログラムなどを充実したい感じです〜
※ヒドイ実装とは、設定ファイルのパースとか、機能が分離出来ていない
モトローラーファイルフォーマットの入出力など。
※その為、バージョンは「0.72b」としている。
Renesas R8C Series Programmer Version 0.72b
Copyright (C) 2015, Hiramatsu Kunihito (hira@rvf-rc45.net)
usage:
r8c_prog[options] [mot file] ...
Options :
-d, --device=DEVICE Specify device name
-e, --erase Perform a device erase to a minimum
--erase-all, --erase-chip Perform rom and data flash erase
--erase-rom Perform rom flash erase
--erase-data Perform data flash erase
-i, --id=xx:xx:xx:xx:xx:xx:xx Specify protect ID
-P, --port=PORT Specify serial port
-a, --area=ORG,END Specify read area
-r, --read Perform data read
-s, --speed=SPEED Specify serial speed
-v, --verify Perform data verify
--device-list Display device list
-V, --verbose Verbose output
-w, --write Perform data write
--progress display Progress output
-h, --help Display this
MacBook Pro でシリアル接続して、R8Cの書き込みや、消去、を色々試したけど、
とりあえず、何の問題も無い、十分に使えると思う。
自分としては、俺俺フレームワークでGUI版も作りたいけど、それはまた、後で
考えるとして・・
ソースコード一式は、GitHubにプッシュ済み、一応 MSYS2 でコンパイルと簡単な動作は
確認済みなので、Windows でも使えると思う、MSYS2 の clang では、シリアル制御関係の
ヘッダーが無い為、コンパイル出来ない、Makefile 内で、MSYS2 環境では gcc を使うよ
うにしてある。
ifeq ($(OS),Windows_NT)
R8C関係 GitHub
さて、R8Cは、メモリーが64K使える事が判ると、SDカードの操作も楽に出来そうだし、
色々と夢が膨らむ〜
R8C本体に行く前に、先週、買ってきたもので、ちゃんとしたライターを作っておこうと思う。
以前の書き込みハードはあまりにショボイ・・
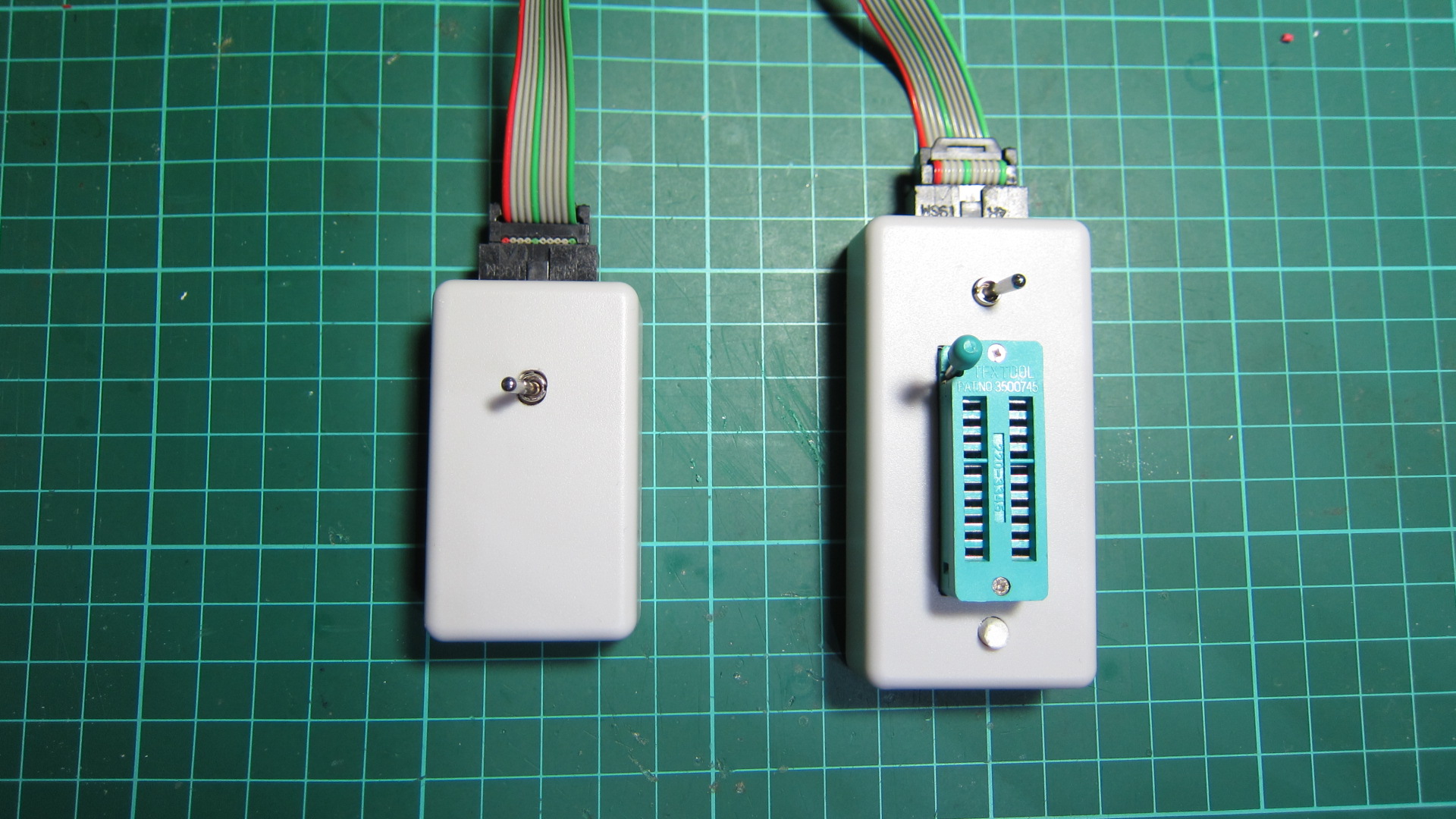
色々考えた末、USBシリアル部分と、R8Cのライター部分を分離した構造にした。
USBシリアルは、色々な場合に使う事が多いので、分離しておけば、便利に利用できるだろう。
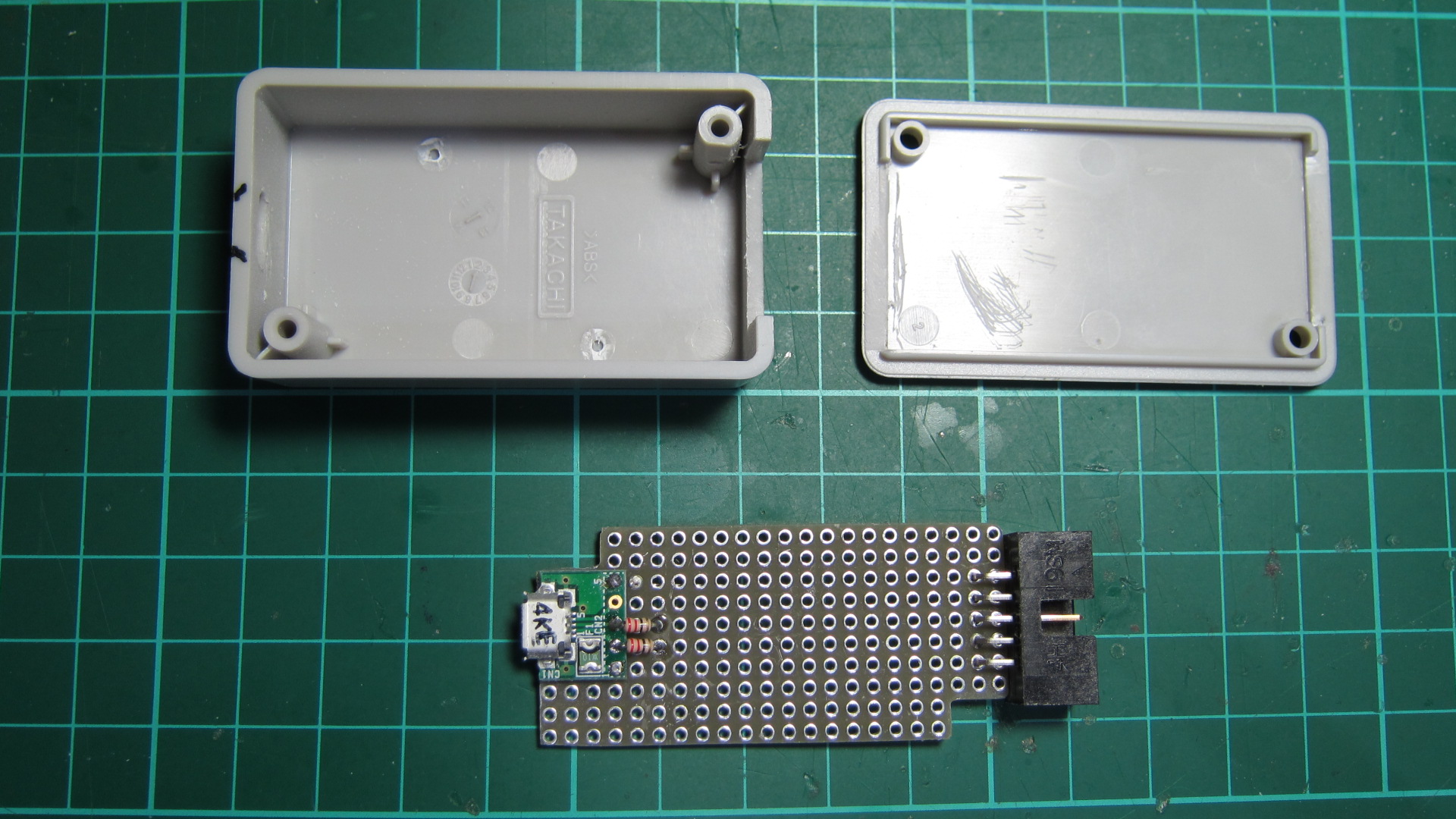
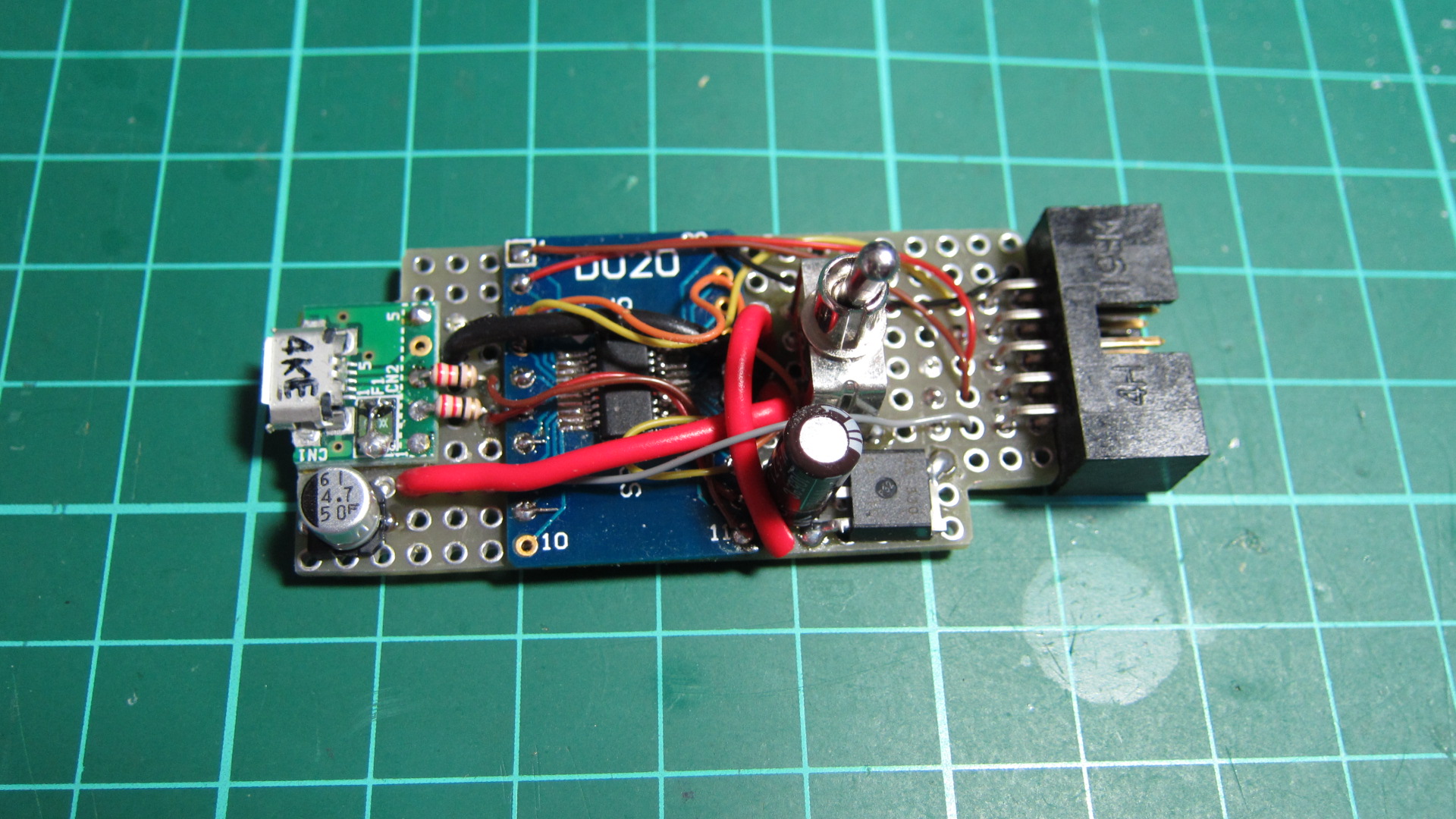
まず、USBシリアル変換、モジュールが比較的安く売られているので、それを使っても良いが、
小さいケースに収めて、綺麗に作りたかったので、部品をバラで買ってきた、デバイスは
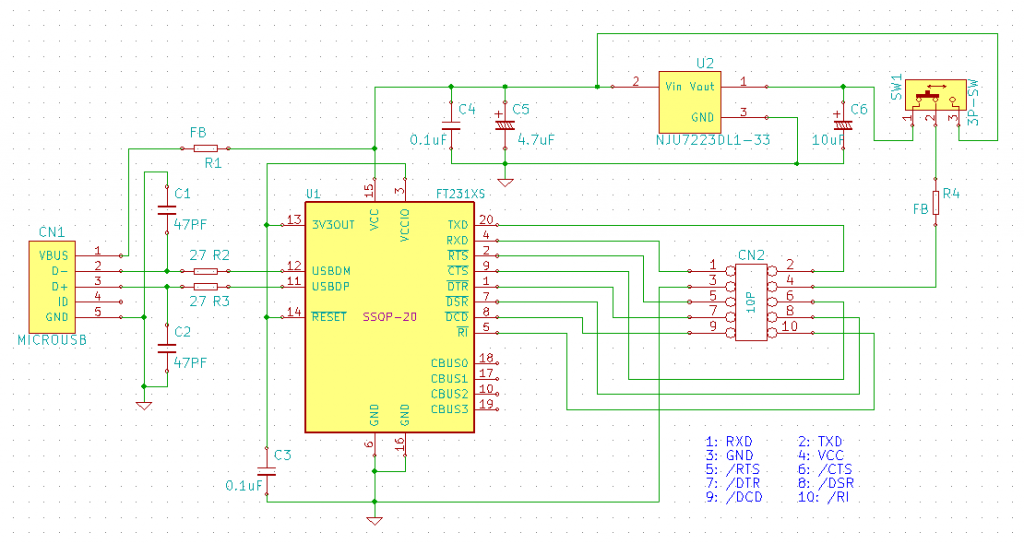
FTDI の FT231XS、単品だと安くて210円だった。
SSOP20 ピンのハンダ付けが、少しだけ厳しい・・
それと、マイクロUSBコネクター、調べると、ミニUSBコネクターより、マイクロUSB
コネクターの方が、抜き差しの耐用が高いらしい。
また、スマホがマイクロUSBコネクターを採用している事が多く、ケーブルも調達がしやすい。
RTS、CTS、DTR、DSR など制御線を出しておきたいので10ピンのコネクターを出す。
それと、5V、3.3Vを切り替え出来るようにしておく。
3.3Vは、ICにレギュレーターが内蔵されているけど、取り出せる電流が少ないので、別途
三端子レギュレーターを載せる。
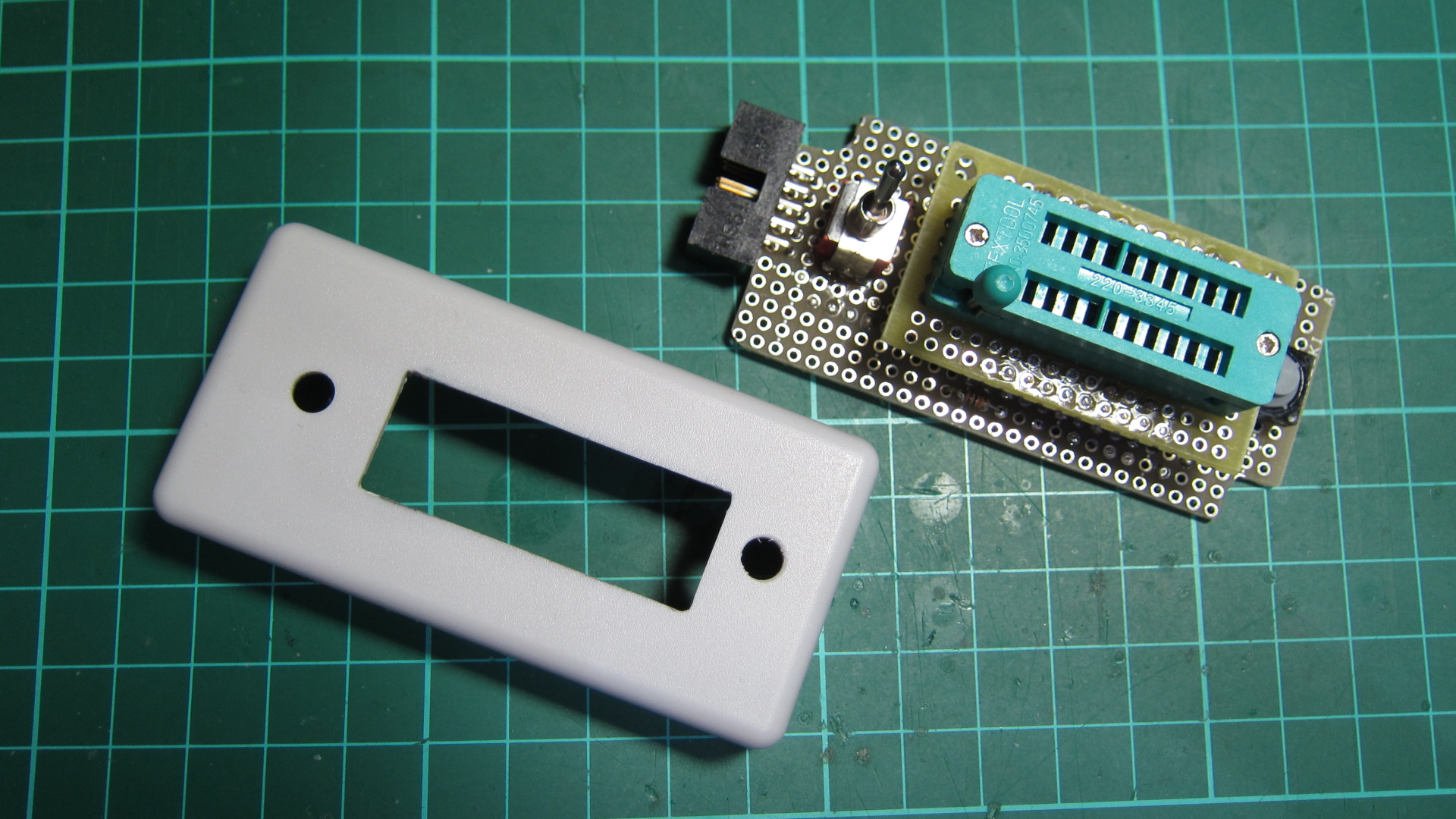
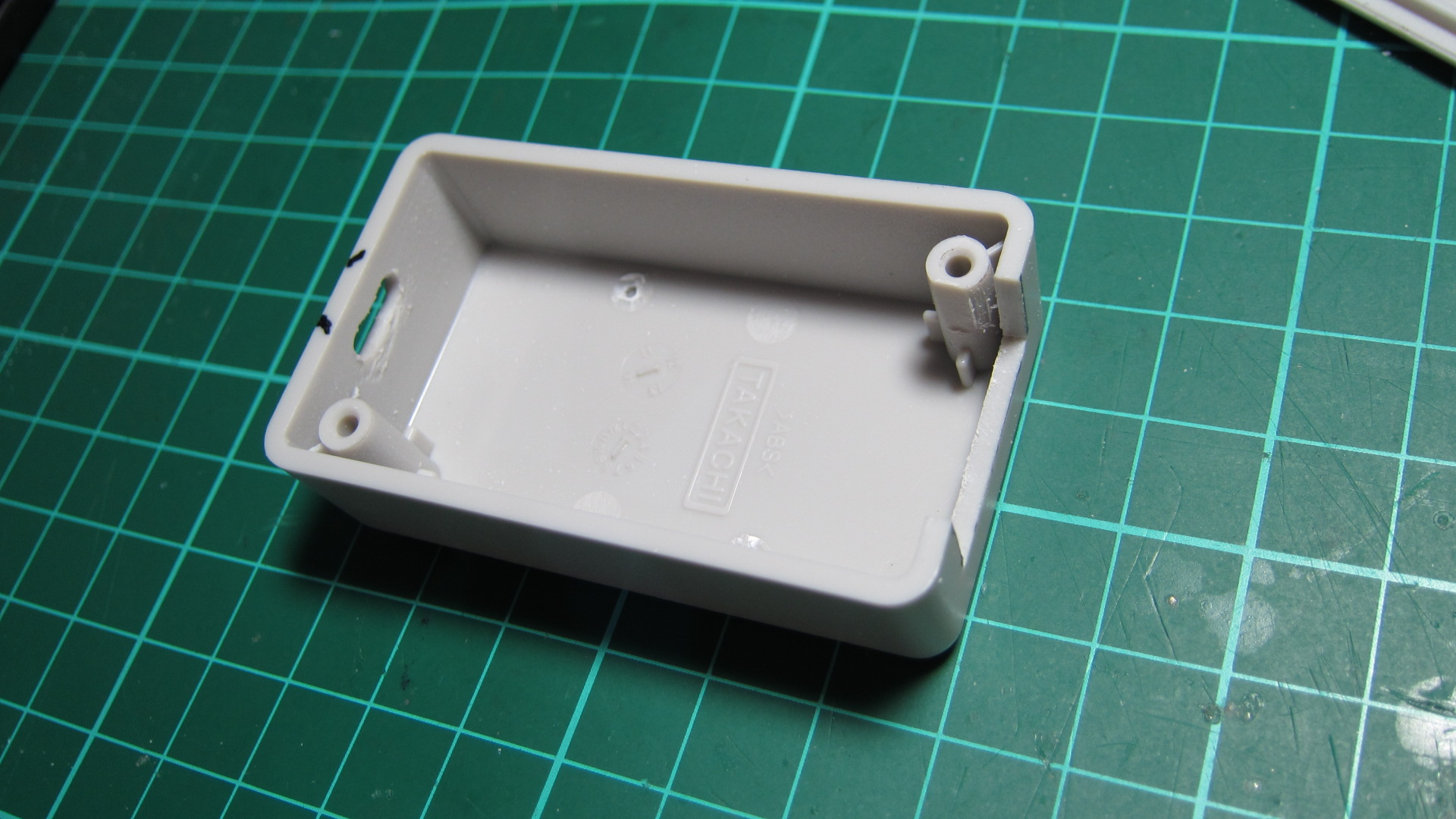
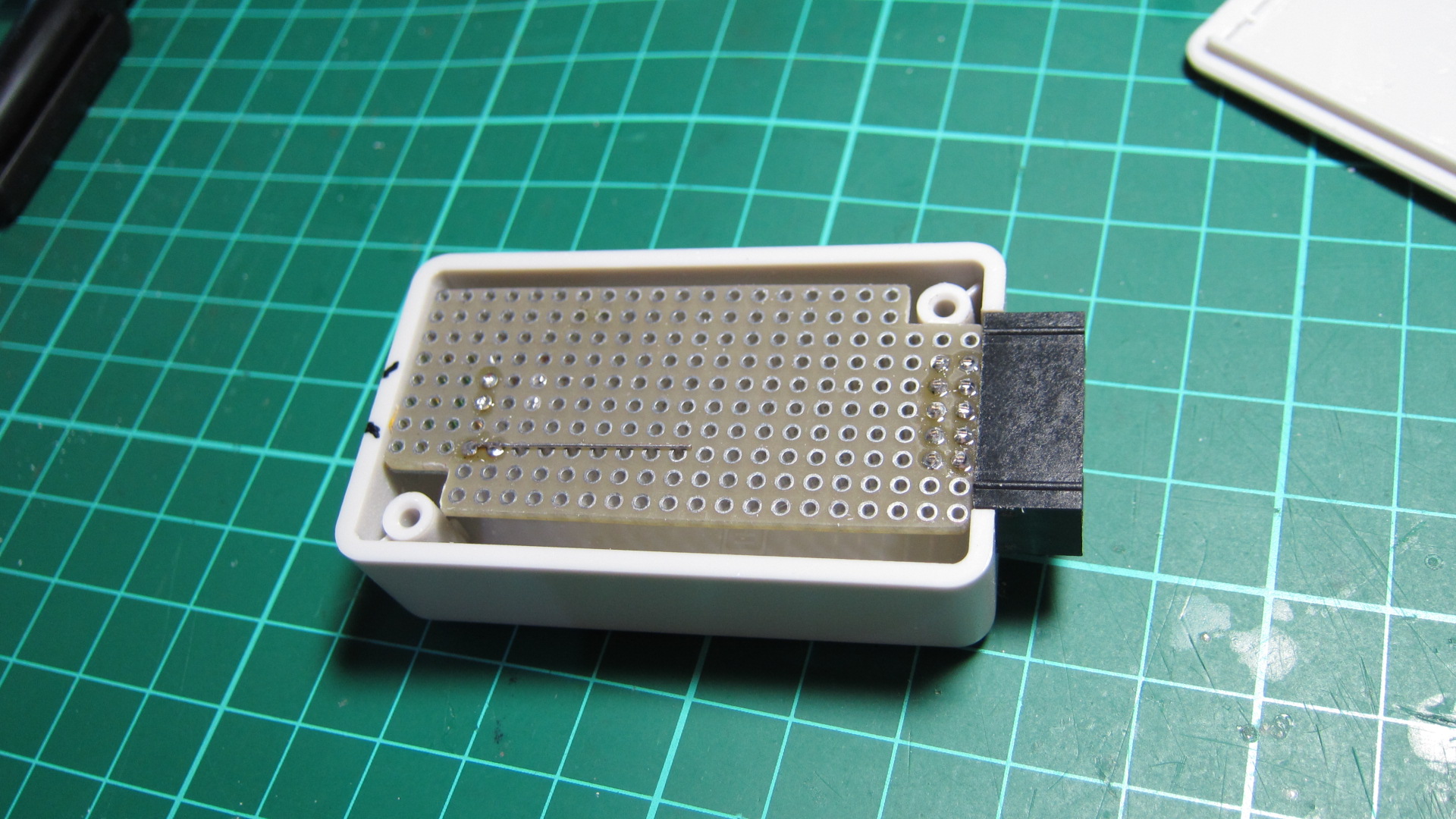
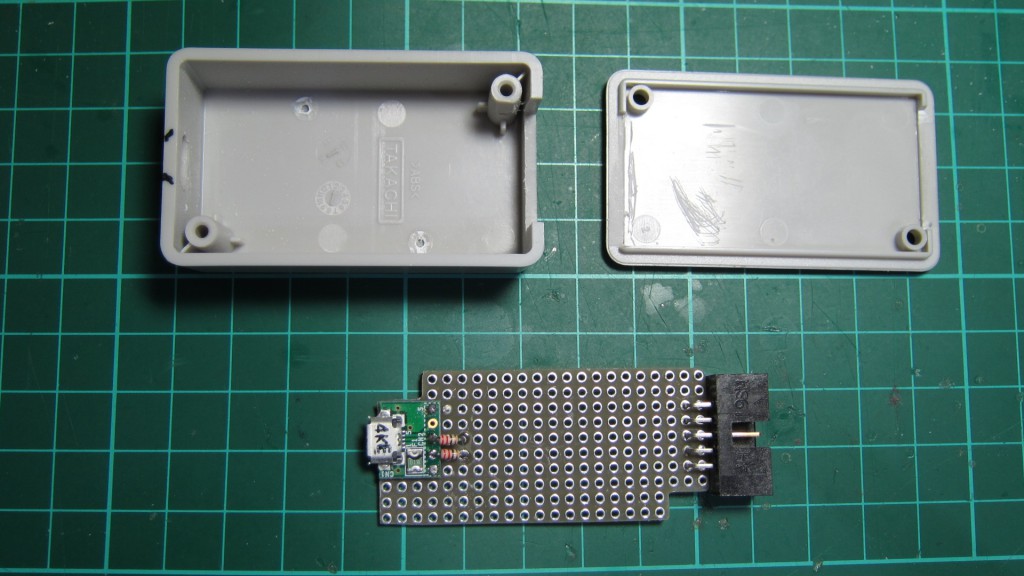
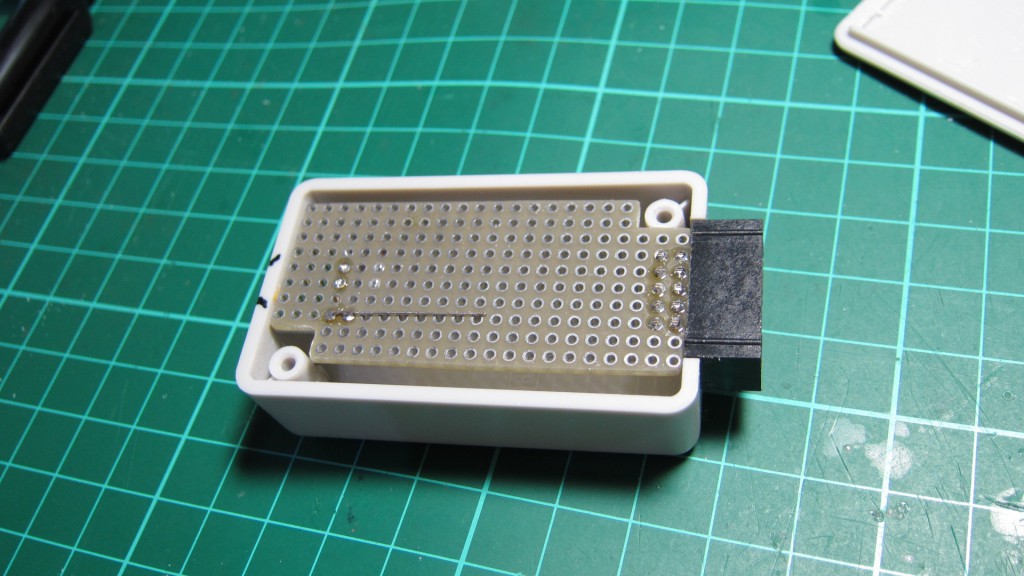
ケースは、「タカチ」の「TW4-2-6」を使った。
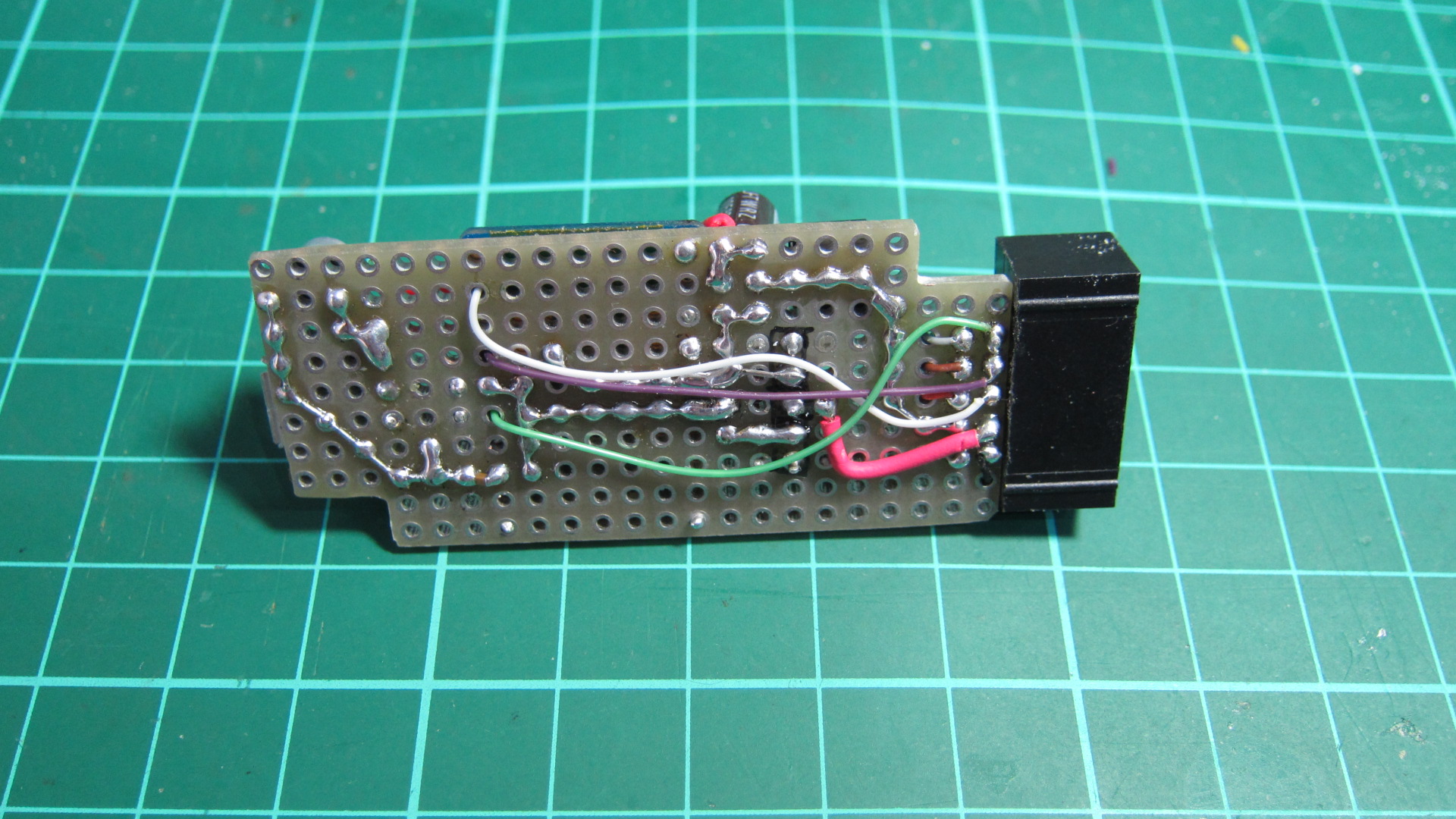
以前から、採用している構造で、非常に具合が良いのだが、L型の10ピンコネクターを横に出す
構造にして、反対側は、マイクロUSBコネクターの先端で受けるようにする事で、基板を抑える
事が出来、シンプルに収まる。

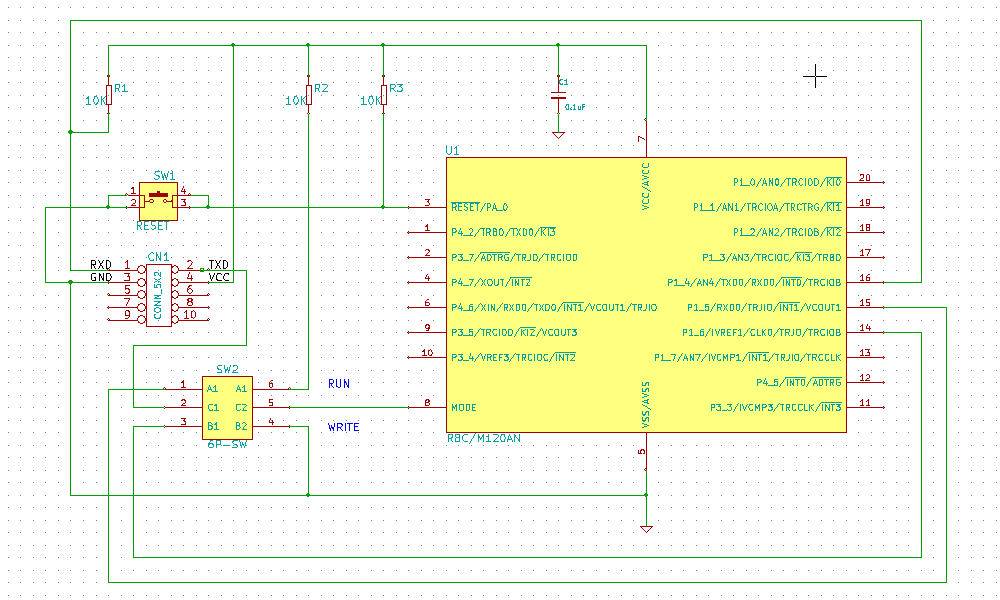
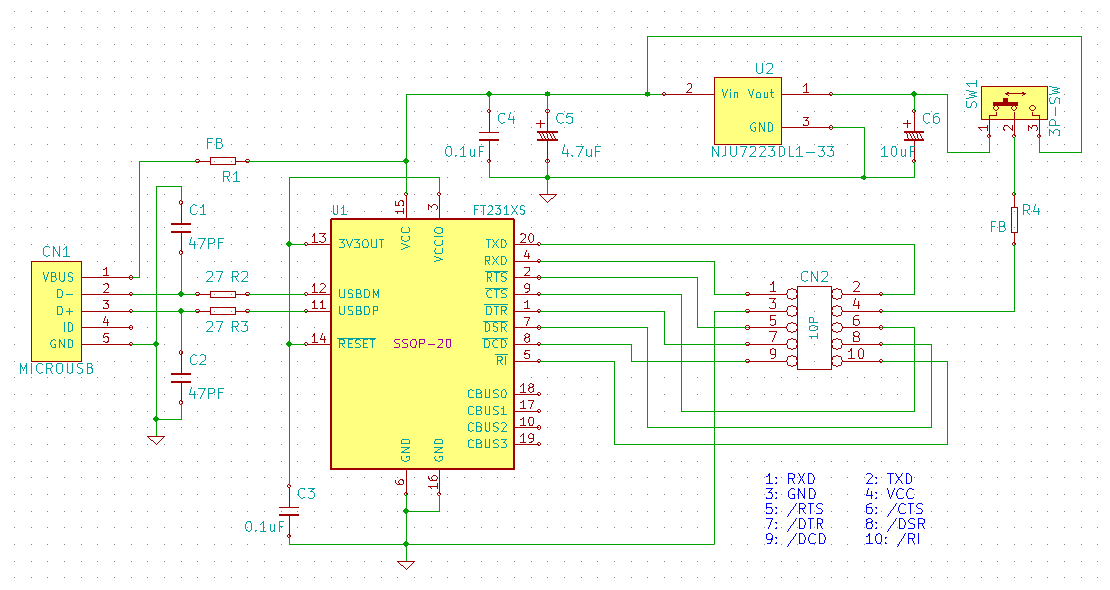
一応KiCADで回路を引いた、この関係ファイルもGitHubにプッシュしてある。

さて、これでシリアルモジュールが出来たー、次は本命のR8Cライターなんだけど、これは次回にでも~