去年くらいに、18650タイプのリチウムイオンセルを複数購入していた。

モバイルバッテリーを自作したかったのが主な理由だったが、大きな電流を流
す場合、電池ボックスでは、接触抵抗が大きくて駄目なのがハッキリしている。
そこで、スポット溶接機を自作する予定で、部品を集めだしたが、面倒になっ
て、伸び伸びになっている・・・
最近、YouTube を観ていたら、「eBay Fake 18650 cell」関連の動画がかなり
眼に止まり、以前に買ったセルの容量を確認しておく必要があるだろうと思い
たった。
Fake ebay batteries 18650
※中国には、「Fake USB Memory」など、巧妙に騙してお金を稼ぐ商売が普通に
あり、注意(安いだけの事はある)しなければならない、恐ろしい国だ・・・
酷いセルは、中に砂が詰められているだけの物もある~
そこで、フル充電を行ったセルで、放電を行い、容量を確認してみた。
※充電には、TP4056を使った中華のリチウム・イオン・バッテリー・
チャージャー・モジュール(110円)。
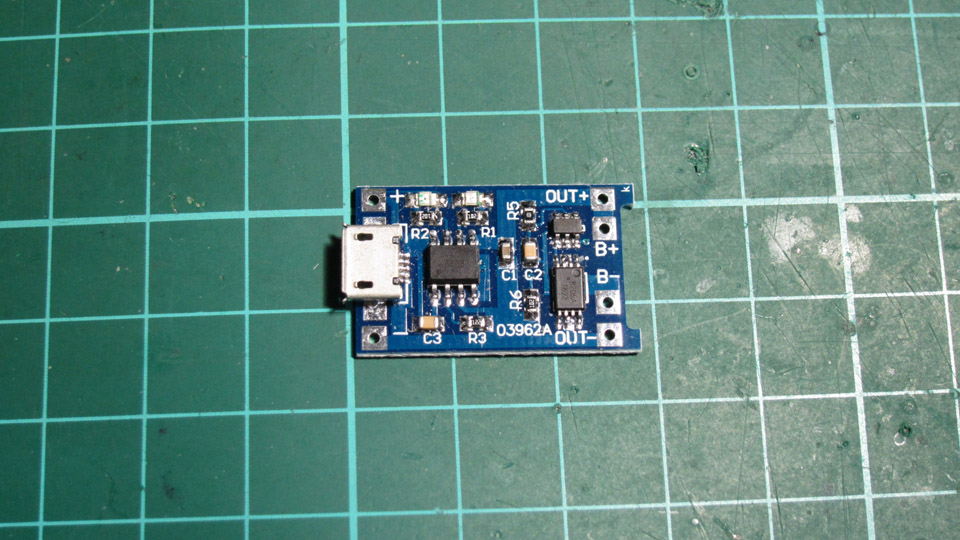
このモジュールは、1A程度で充電が行え、バッテリーの過放電保護、インジケ
ーターLEDなども付いている優れ物だ。
充電中は「赤」、充電完了で「青」
普通に考えて、これだけの物を110円で作る事は到底不可能だ・・・
※放電試験には、「PERFECT NEO」を使い、0.5Aで放電を行った。

このマルチチャージャー、ディスチャージャーは、機能が豊富。
※リチウムイオン電池に表示されている容量は、定電流で放電を行い、終始
電圧になった時の積算時間から決めているようだ。
当然、内部抵抗はそれなりにあるので、放電レートを大きくする程、みかけ
の容量は小さくなってしまう。
一般には、0.2C(2500mAhのセルで500mA)程度で試験する
ようだ。
また、終始電圧は2.75V前後のようだが、通常の運用では、セルの寿命
を考えた場合、3V程度にする方が良さそうで、その場合、容量は若干少な
くなる。
(1)SANYO UR18650A: 3.6V 2250mA
(2.75V)実測:41g(規格表の値:43g)
・Amazonで購入(@635円)
最終電圧:2.9V、236:41 (2003mA)※これは問題無し!
(2)ICR 18650: 3.7V、2200mA
(2.75V)、実測:42g
※マイナス側に「UltraFire」の刻印があるが、保護回路は内臓さ
れていないようだ。
・Amazonで購入(@400円)
6番セル(仮名)
最終電圧:2.9V、175:22 (1510mAh)※不良か?
※このセルは6本買ったが、どれも、容量が大幅に小さく、Fakeを掴ま
されたようだ・・・(涙)
(3)Li-ion 18650 3.7V、2600mA(プルタブ付)
47g
・Yahooオークションで購入(@420円)
最終電圧:2.9V、286:16 (2453mAh)※問題無し!
-----
自作機器に使う場合は、プルタブが付いている方が便利なので、ノートPC
用のバッテリーパック(新古)を購入して、分解してセルを取り出した方が
良いのではと思っている。
オークションでは、そのような分解セルを購入する事もできる。
-----
通常、購入時には、保管に適した(50%充電)状態で来る、この時、電圧
は3.8V前後となっており、それが、著しく低い場合などは、セルの不良
が考えられる。
※ICRの6番セルがそれにあたる。