Hewlett Packard
Enterprise 800W
80 PLUS PLATINUM
型番:HSTNS-PD41
INPUT:100V-240V~ 9.4A-4.5A 50-60Hz
OUTPUT:+12V 67A MAX
安全規格:IS 13252(Part 1)/IEC 60950-1
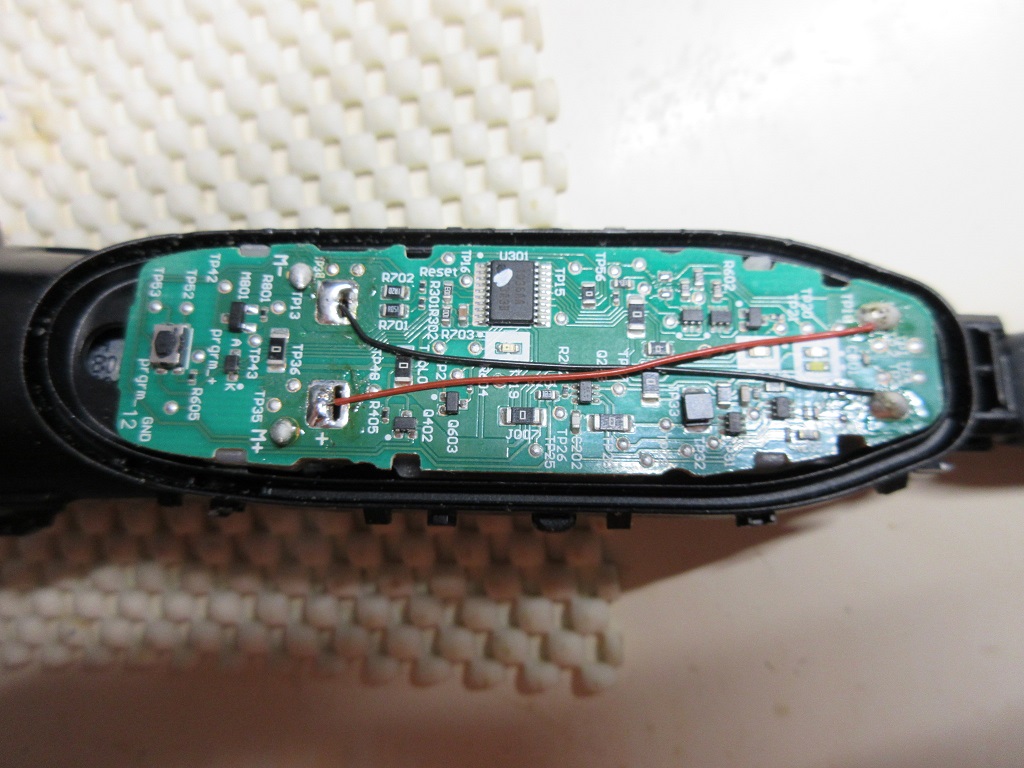
制御基板で判る部品

- UCD3138 Highly Integrated Digital Controller for Isolated Power with 3 Feedback Loops and 8 DPWM Outputs
- dsPIC33F High-Performance, 16-bit Digital Signal Controllers
UCD3138 は、Texas Instruments(TI)が開発した、分離型電源向けに高度に統合されたデジタル制御用プロセッサです。6-mm × 6-mmの小型パッケージに、32ビットARM7TDMI-Sプロセッサ、高精度データコンバータ、複数のプログラマブルなハードウェア制御ループ、通信インターフェースを統合しており、サーバー、通信機器、高電力DC-DCモジュールなどに適しています。
主な特徴:
- 3つのフィードバックループと8つの高解像度DPWM出力(250-psパルス幅分解能)を備える。
- 14ビットDAC、16MHz EADC(最小1mV/LSB解像度)、12ビット267ksps一般用途ADCを内蔵。
- 高効率制御:同期FETのソフトオン/オフ、動的フェーズシェービング、動的周波数調整、モードスイッチングをサポート。
- 全分離型トポロジー(PSFB、LLC、フルブリッジ、PFCなど)をサポート。
- 保護機能:サイクルバイサイクル電流制限、過電圧/過電流/過熱保護、入力電圧フィードフォワード制御。
- 開発支援:Code Composer Studio™、Fusion Digital Power Studio GUI、評価ボード(UCD3138PFCEVM-026など)を提供。
dsPIC33F は、Microchip Technologyが提供する16ビットのデジタル信号コントローラ(DSC)ファミリです。高性能なDSP機能を搭載しており、40 MIPS(3.0–3.6V)で動作し、産業用温度範囲(-40°C ~ +85°C)に対応しています。このファミリは、高速な17×17ビット乗算器、40ビットALU、2つの40ビット飽和積算器、40ビットバイ方向バーレルシフターを備え、1サイクルで乗算・積算(MAC)を実行できるため、リアルタイム信号処理に最適です。
主な特徴:
- 40 MIPSの高性能CPU
- DMA(Direct Memory Access) 機能を搭載
- 12ビットまたは10ビットADC(複数のサンプルアンドホールド対応)
- CANインターフェース、UART、SPI、I²Cなどの通信インターフェース
- ペリフェラルピン選択(PPS) 機能により、ペリフェラルのピンマッピングを柔軟に設定可能
- 28ピンから100ピンまでのパッケージ選択肢
- 12KB~256KBのフラッシュメモリ、16KB~64KBのRAM
大雑把に見える部分で、目立ったのは、デジタル制御電源である点だ。(電源で、このような贅沢な構成は観た事が無い)
負荷がダイナミックに変動する機器で、全負荷に対して、最大の効率を達成しようとすると、従来のアナログ回路だけでは、難しい事がある。
デジタル制御なら、色々な状況を判断して、最適な制御を導入する事が出来る。
又、出力先が故障した場合などにも、即座に対応でき、安全対策も、十分行える。
しかし、恐ろしい程コンパクトに作られている、これで 800W もあるのは、本当に驚きでしかない・・・
PFC 部分の推定
- 当然ながら、ダイオードブリッジは無く、多分パワー MOS-FET によるブリッジレスとなっているものと思う
- インターリーブ構成になっていると思われたが、スペースの都合だろうと思うが、そうはなっていないようだ(インターリーブにすると効率が若干良くなり、熱的に有利になる)
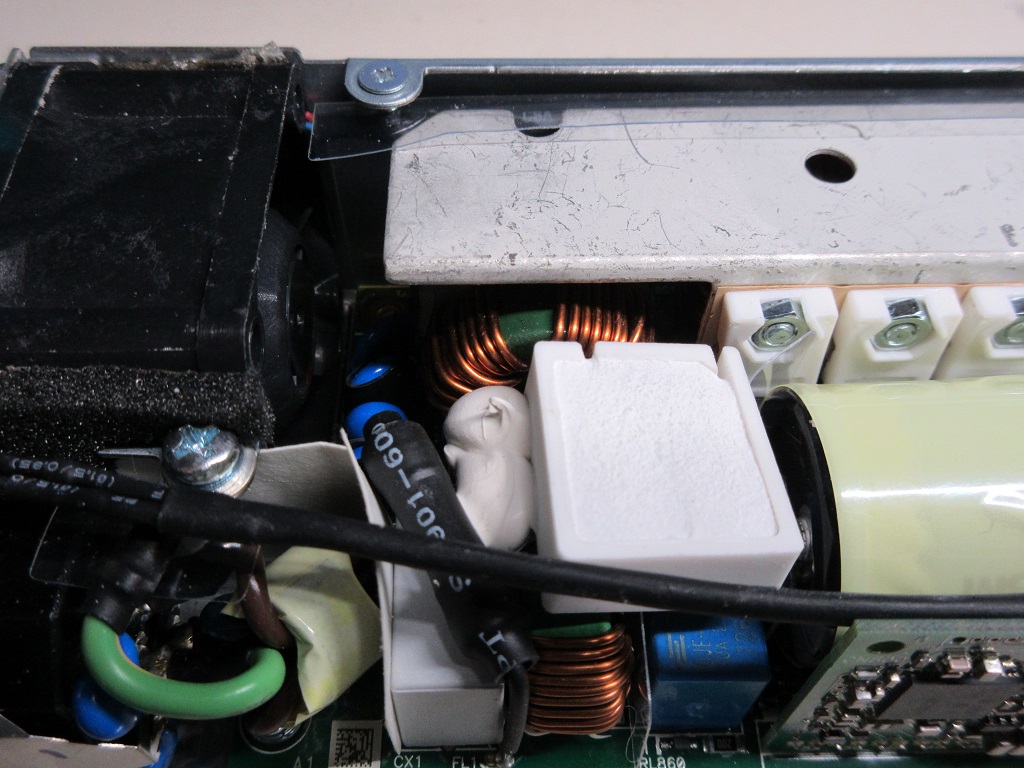
- PFC の出力段にある、平滑コンデンサがかなり大きく、電源のスペースをかなり取っている(制御基板の上にある黄色い物体)
- PFC で、入力を 100V~240V とかにすると、PFC の構成上、出力は、大抵 380V~400V 位の直流になる
- この電源の出力段にある、平滑コンデンサの端子を測った処、330.8V だった

出力段の構成
- 多分、PFC 段から 12V を得るのに、トランスがあるハズだが、それが、思った以上に小さい
- スイッチング周波数が、かなり高いのだろうと思うが、効率の向上と、飽和しないようにするには、コアの材質が重要だと思う
- 多分、この分野で、大きな技術革新があるものと思う
- 高周波、大電力でも使えるトランスに使えるコアは、一般的な汎用品には無いと思うので、コア材の企業と提携して、特別な物を調達しているのだと思う
- 終段の降圧用トロイダルコイルも、かなり小さい、巻き線の太さはそれなりに太く、さらに、二重にしているようだ
- 一般的な常識では、このサイズだと、良くて150W 位だと思うが、800W・・・、凄いの一言だ・・・
まとめ
壊すつもりで分解すれば、もう少し色々な事が判ると思うが、とりあえず、この位で・・
この素晴らしい電源は、応用範囲が広く、超高性能なので、色々と応用を研究したい~