クワッドコプターは、機械的な構造がほぼ無く、巧みな原理で飛行するのでクールで好きだ。
HobbyKing と言うショッピングサイトがある、主に模型関係の部品を扱っているのだけど、
HobbyKing は色んなとこにリンクが溢れていて、何かの拍子にウィンドウショッピングを繰り返す事も多くて、「欲しい」欲求が抑えられないよー
ヘリコプターの事なんて何も知らないけど・・・
それが、昨日届き、情報を調べながら、組み立て始めたので、その顛末をここに書いておこうと思う。
組み立てがある程度出来てしまったけどーHK-450 フライバーレス
「何故フライバーレスなのかー」
「安さと品質の関係」
「キット以外に何が必要なのか?」
※近くのホームセンターで、1本250円で、1.5mm のドライバーを買ったけど、軸がねじれてしまい、思った力で締められない、先端だけ 1.5mm で、中間は太くて剛性がある物が良いでしょうか。
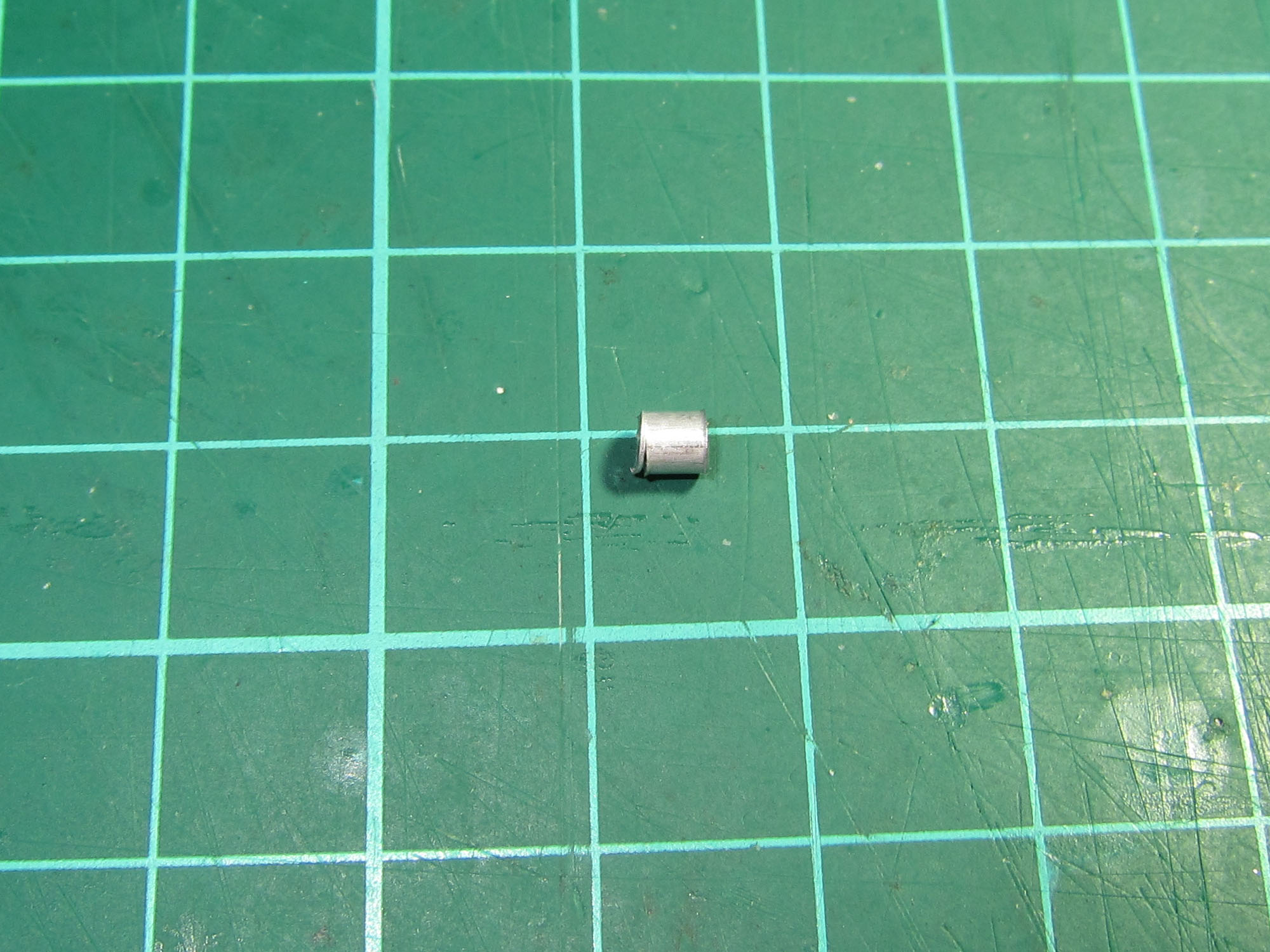
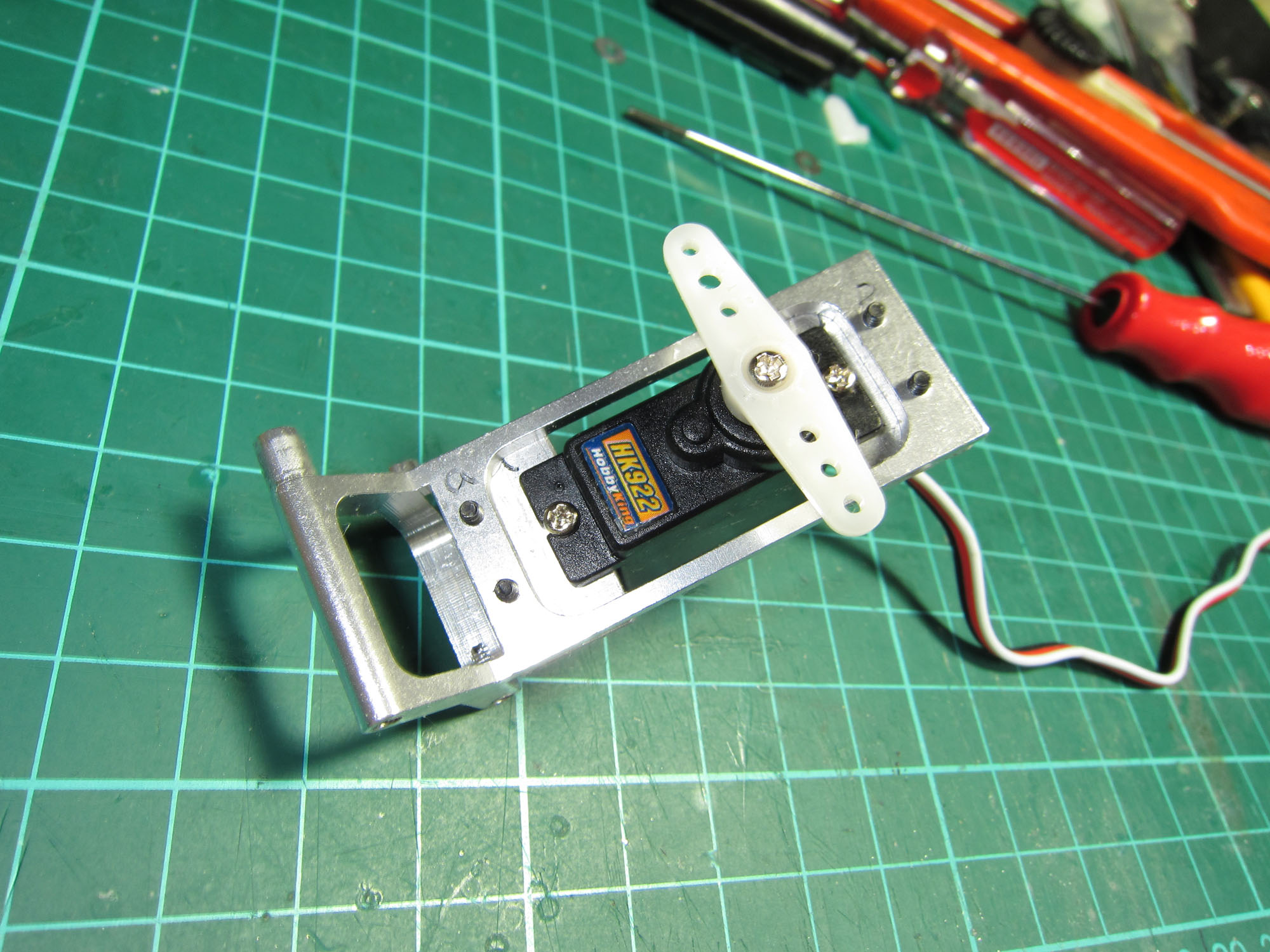
「サーボマウントカラーの製作」HobbyKing 製メタルギアーアナログサーボ サーボマウントは、ラバーで固定するタイプなので付属の2mmネジでは全く合わない、そこで、アルミパイプを加工してカラーを作る事にした。
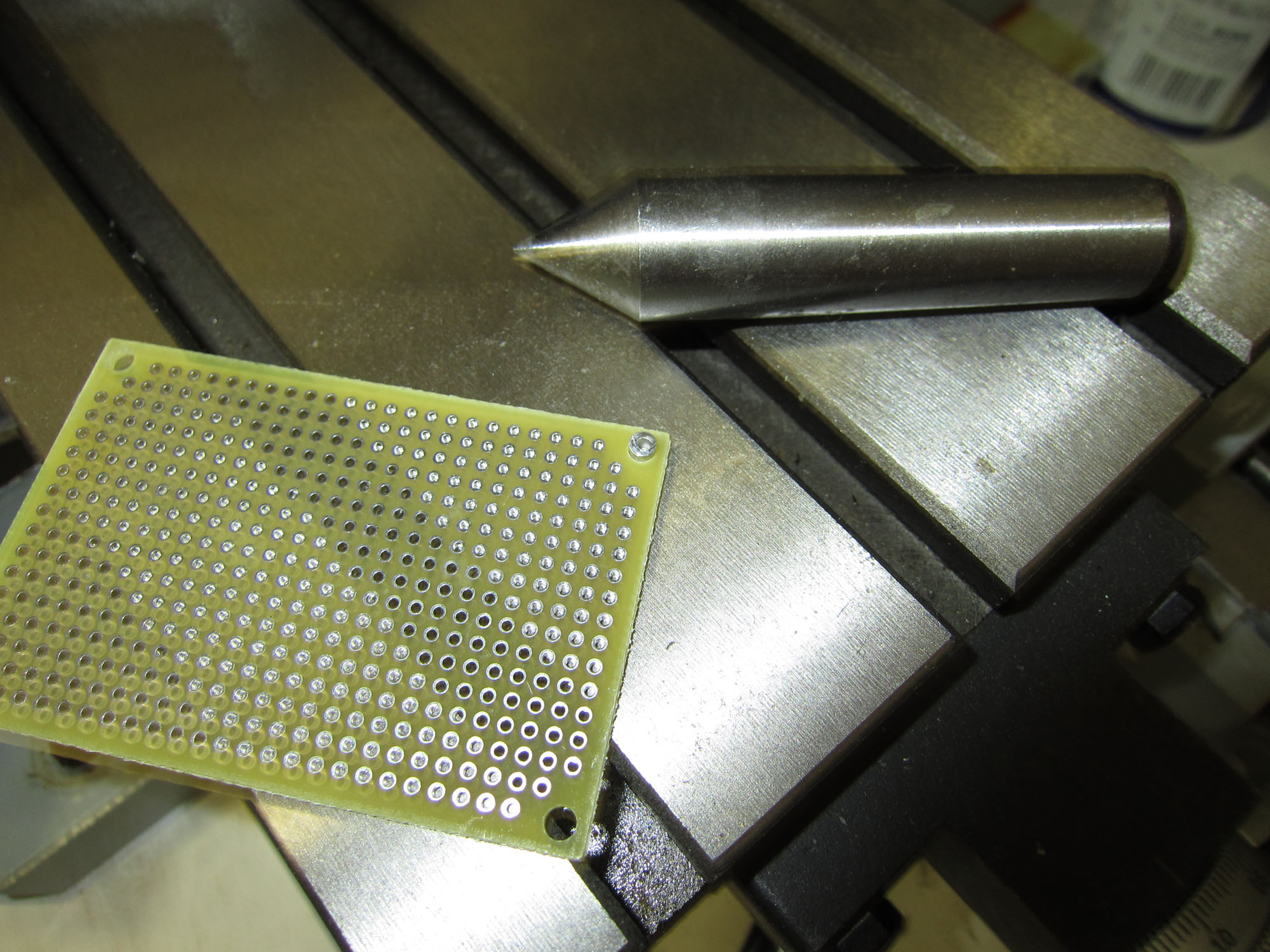
まず、外形3mm、内径2mmのアルミパイプを用意する。(近くのホームセンターで、1m、199円でした)
・何か丁度良い厚み(1.5mmくらい)の板を用意して、3mmの穴を開け、そこにパイプを入れます。
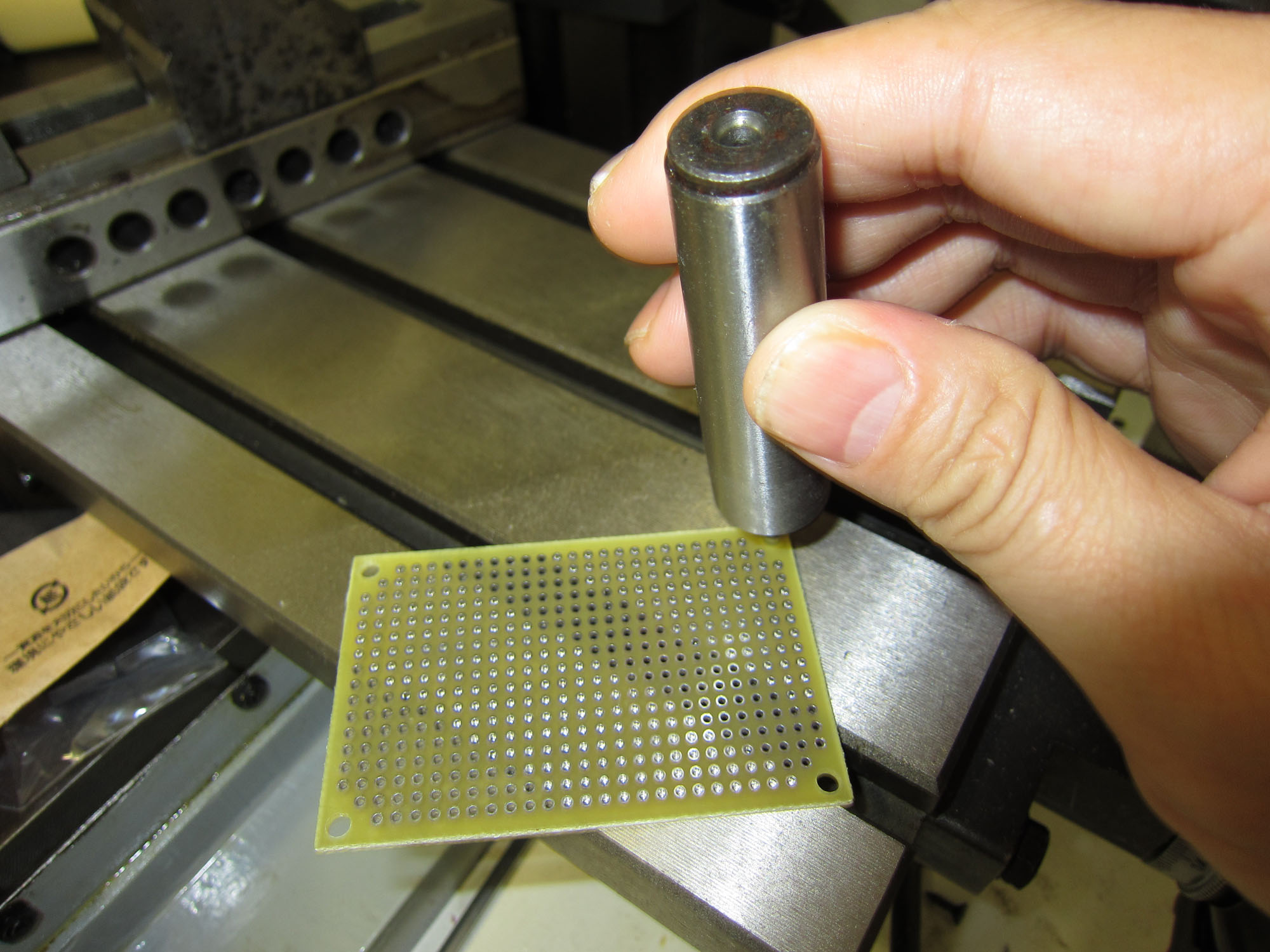
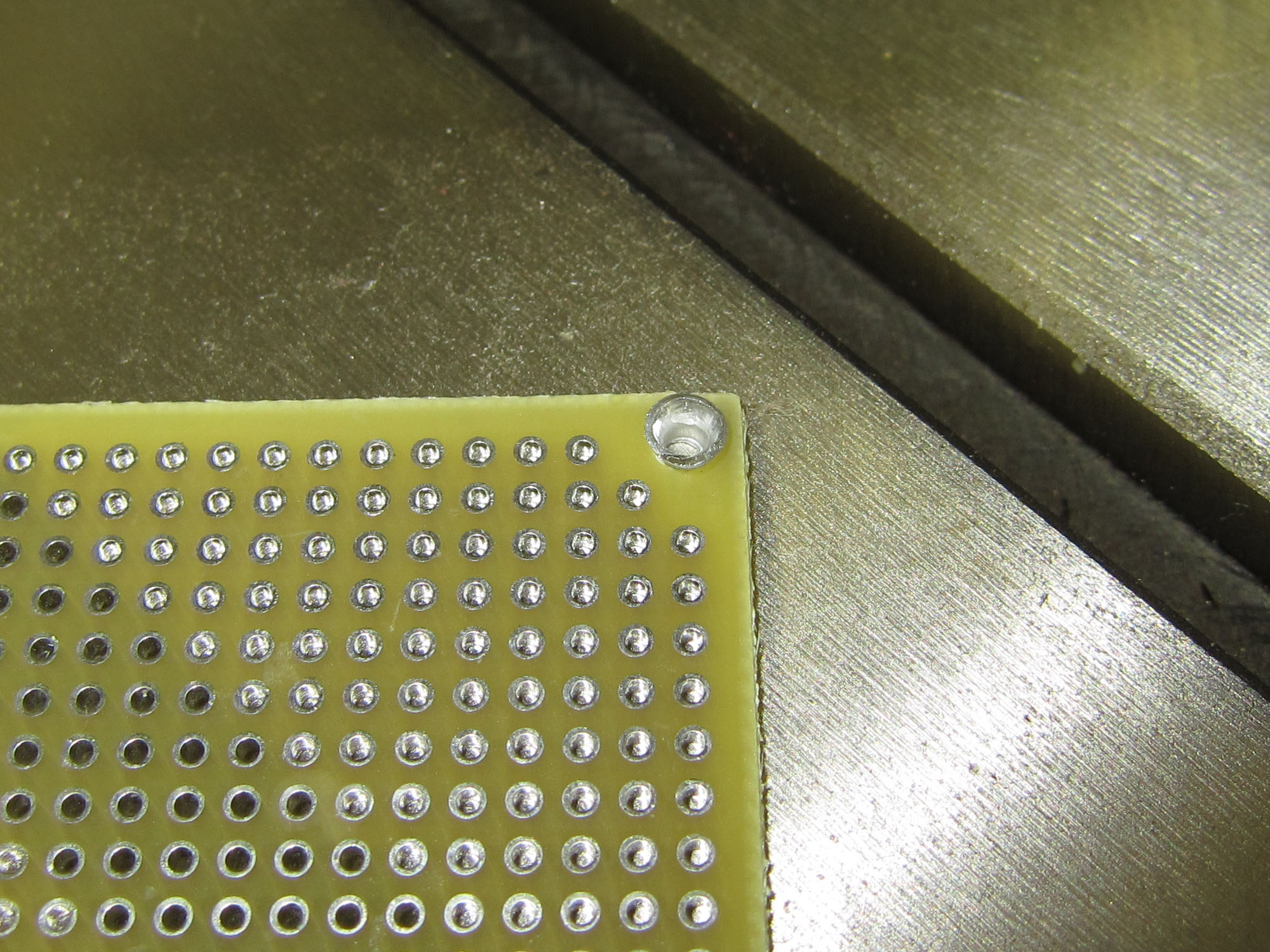
・板から飛び出たパイプの先端を、円錐状の物で広げます。
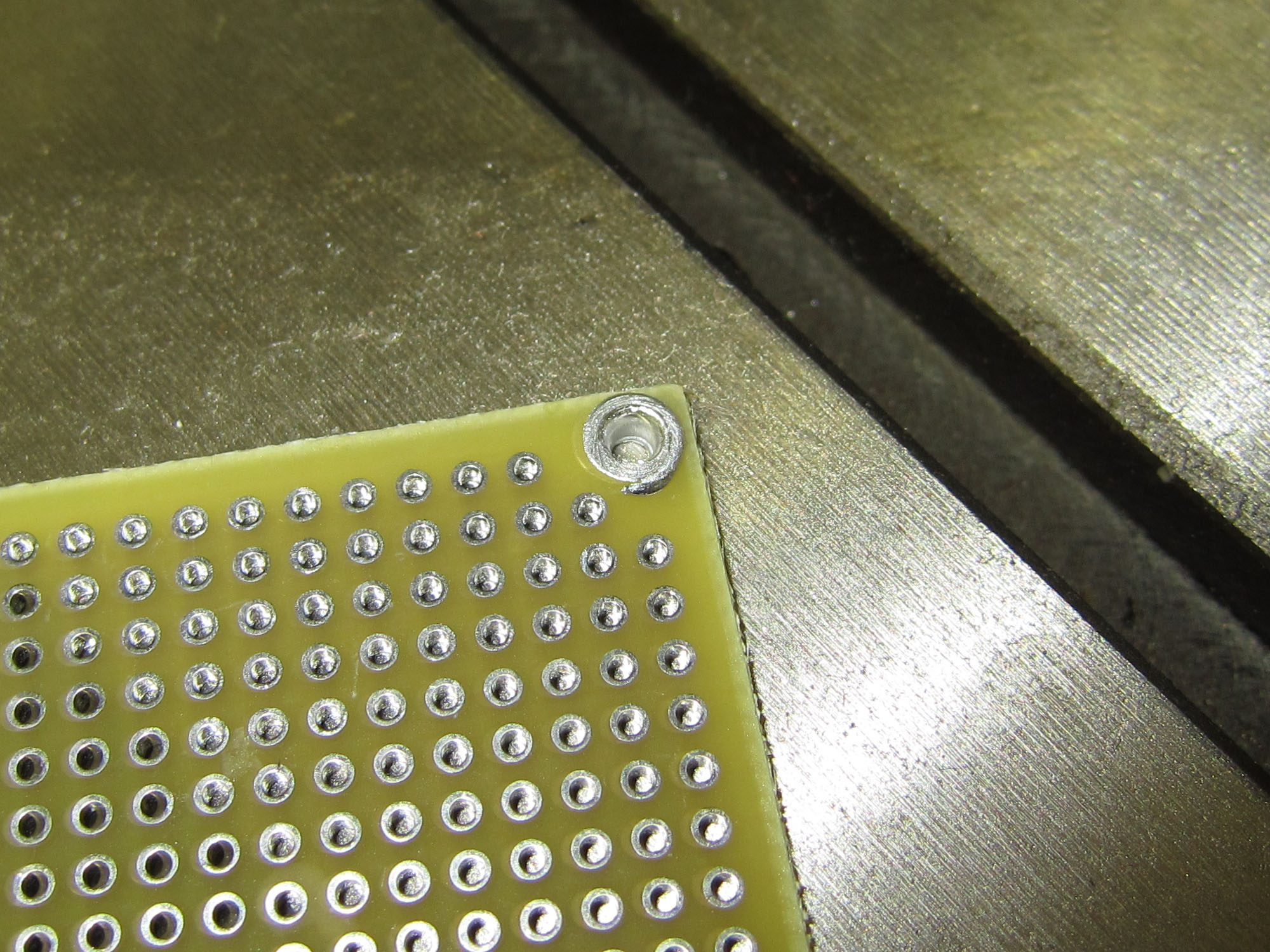
・さらに、平らな物で先端を潰して完成です。
全部で6個必要です。
「テールブレード用サーボマウント」高速タイプのデジタルサーボ を選択しました。
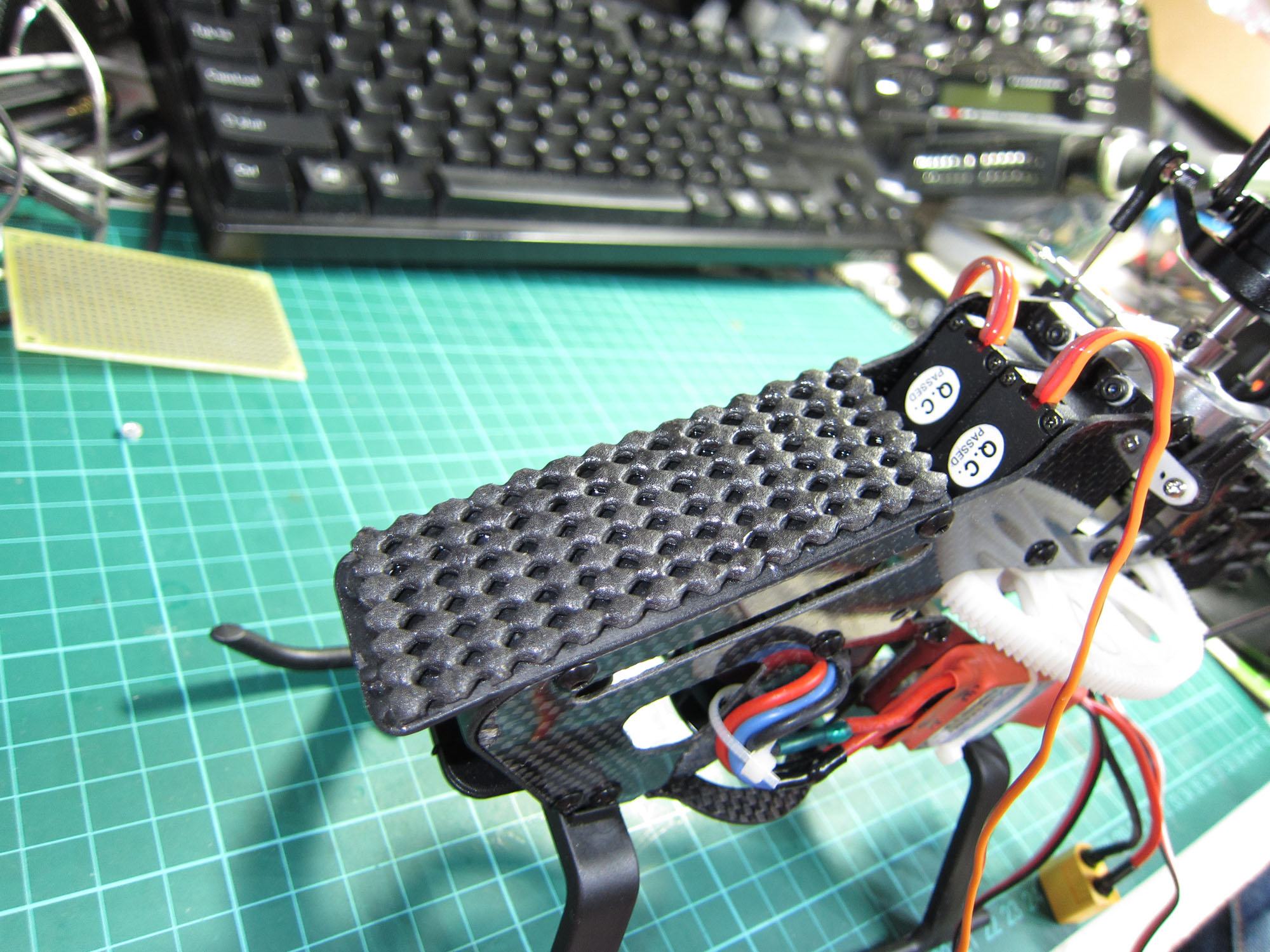
「バッテリーの滑り止め」
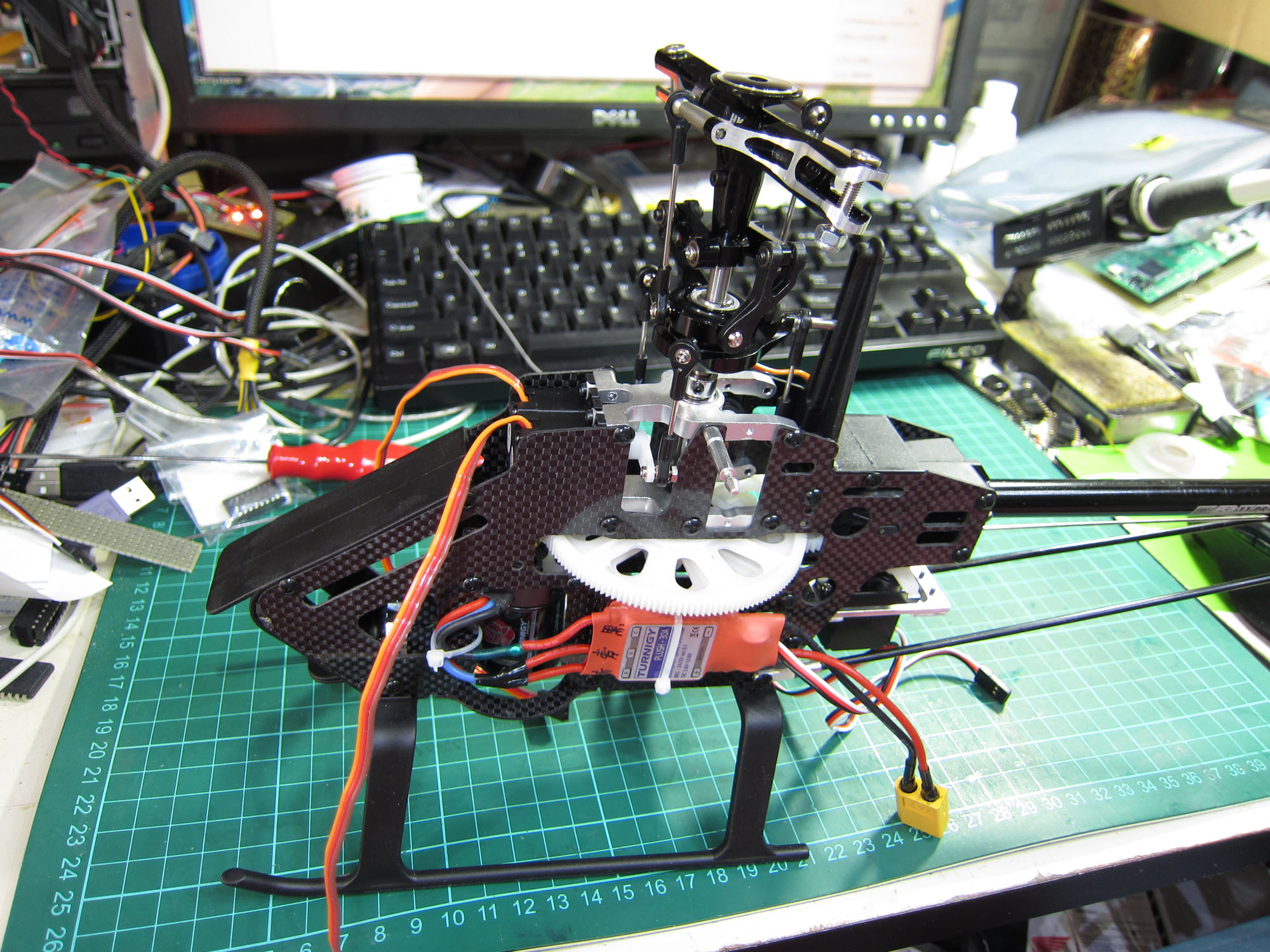
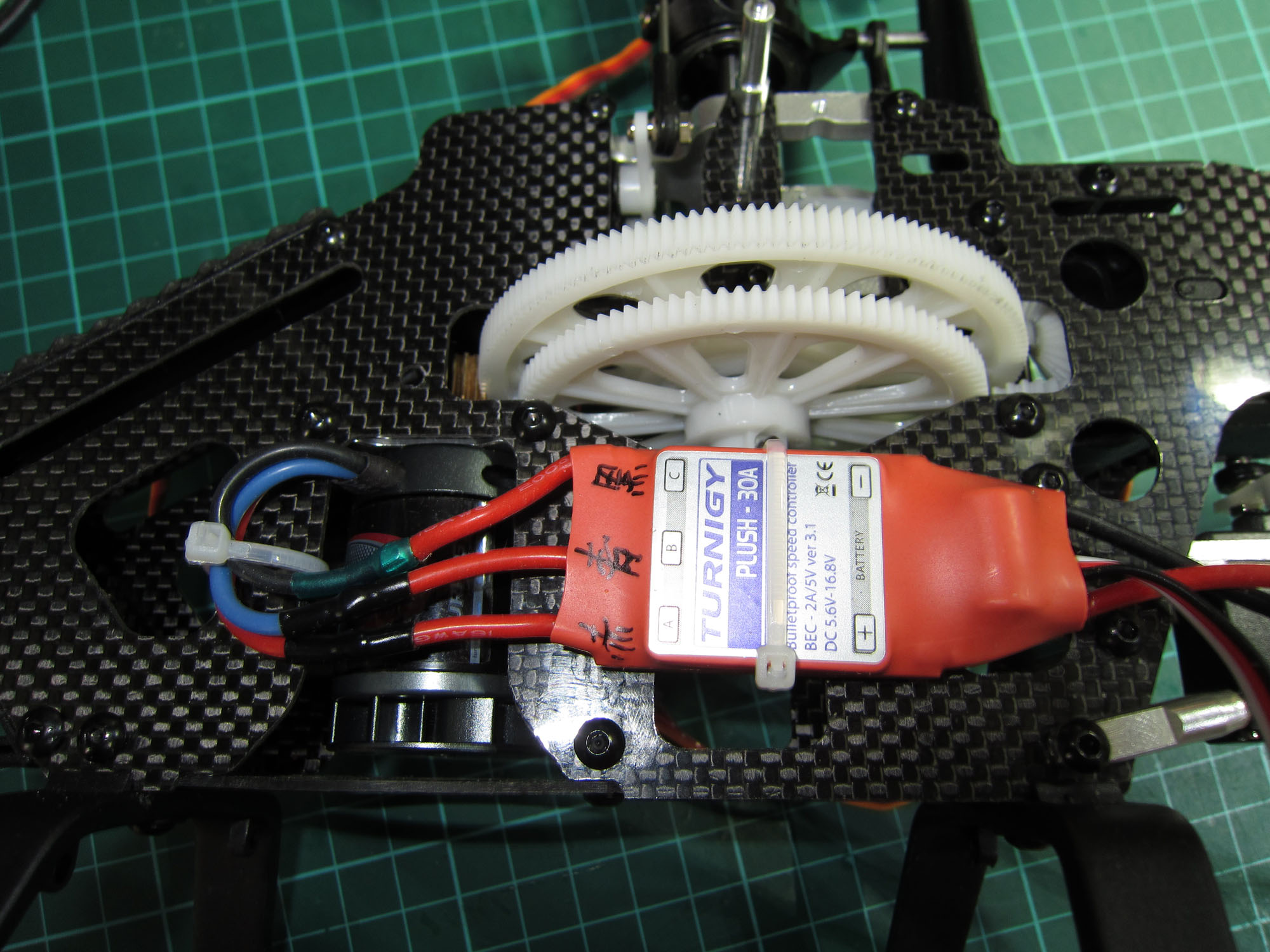
「モーターとESCの取り付け」Turnigy Typhoon 2215H Brushless 450-Size Heli Motor 3550kv にしました、特別な理由はありません、kv 値は一応少し気にして、他の人が使っているモーターと同じくらいの物を選びました。
モーターとの接続は、回転方向があるので注意しなければなりません、仮に繋いでみて、回して、回転方向を確認します。
このモーターには最大28Aもの電流が流れるので、接続はハンダで、ガッチリ行います、接続した部分がショートしないように、ヒシチューブで絶縁します。
今回はここまで~
サーボとのリンケージとか、どのように調整するのか不明な事も多く、その辺りは適当に流しましたが、これから地道にやっていこうと思います。
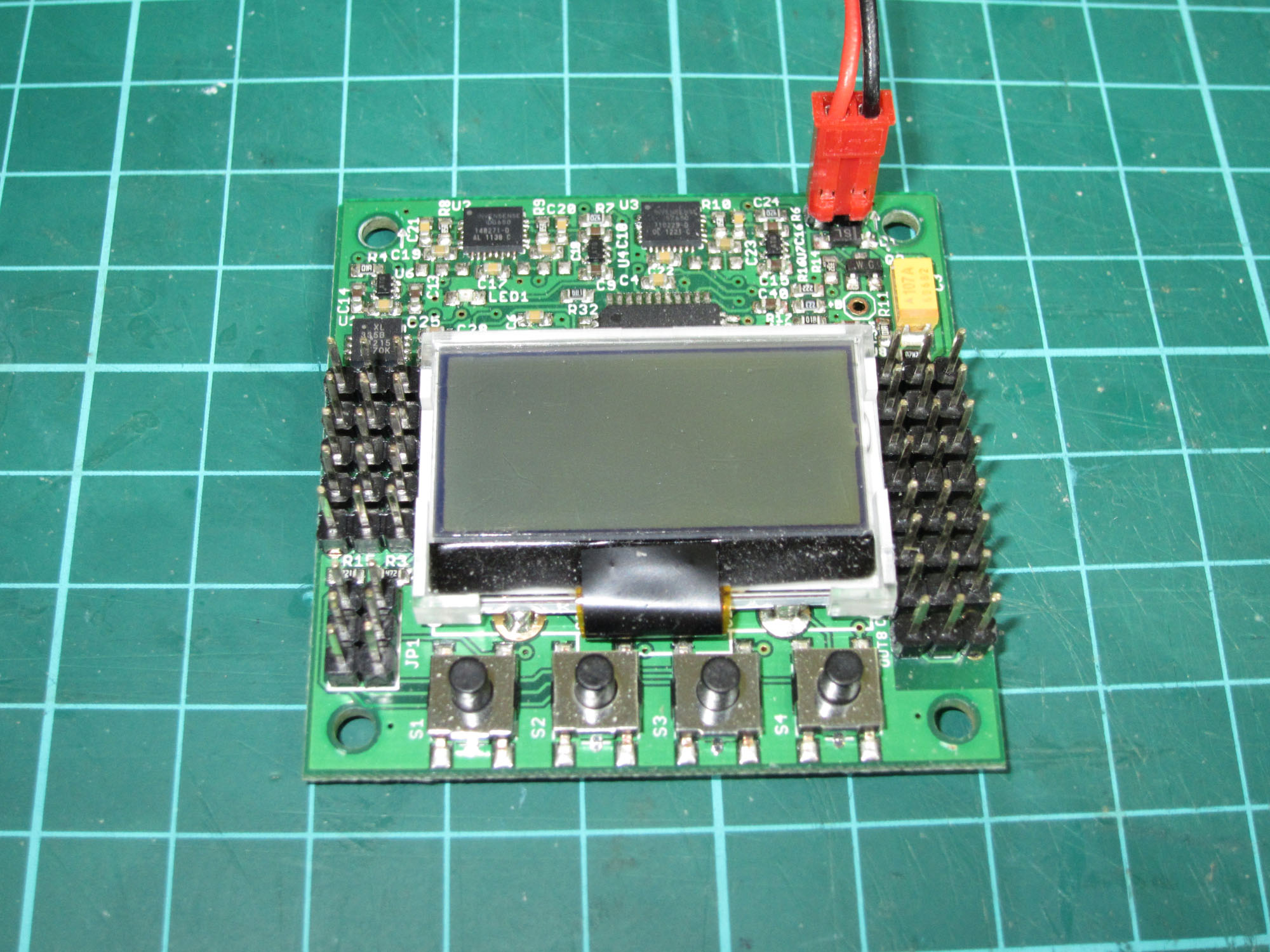
次回は、ジャイロの設定などを中心に紹介する予定です。