CNCで、各軸を動かすモーター制御は、市販されているボードを使う事も出来るが、大抵はPCから制御するだけのボードで、PCを介さない状態で、手動で動かすインターフェースや、各軸の位置表示(PCの画面で行う)なども欲しいと思うので自作してみる事にした。
また、Gコードをパースするだけじゃない方法など色々なフォーマットや、インテリジェンスな制御系も試せる(カメラで画像認識を併用するなど)と思う、他にフライス盤をCNC化するのが中途な状態でもあり、最低2台は必要な事もある。
一般的に、Gコードのパース、制御では、「Mach3」が有名で、このソフトウェアーは非常に優れていて、柔軟性もあるのだが、ライセンス料が少し高い(自分にとっては)、また、ドライブのハードウェアーを簡単にする為、パラレルポートに直接駆動パルスを出力する仕組みで、PCの能力や、裏で動作するデーモン系の動作などに左右される印象を受ける(これは回避するHowToが十分整ってはいると思うのだが)、ハードやソフトを自作する方がよっぽど面倒で時間のかかる作業ではと思うのだが、「作ってみたかった」のが大きい。
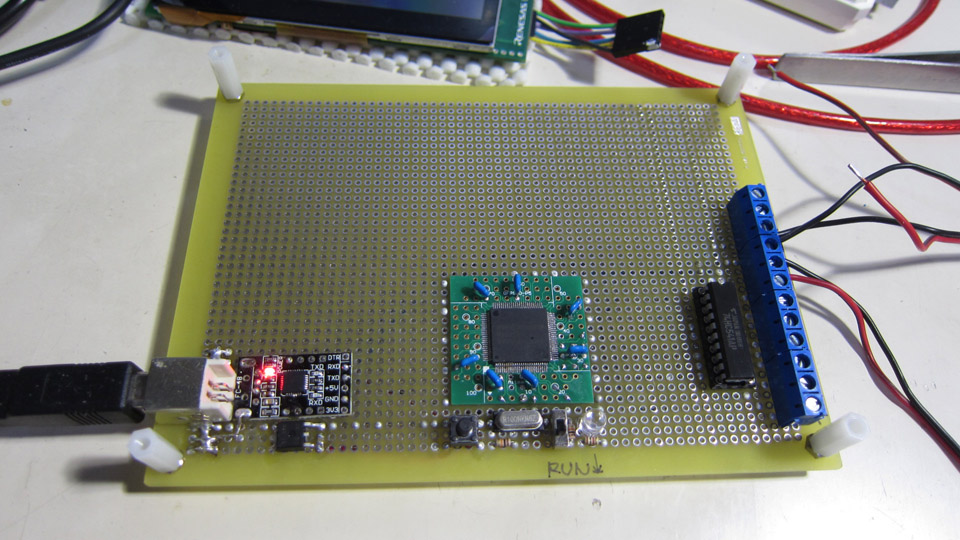
マイコンは何にするか考えたが、自分の手持ちで手頃なのはRX24Tだ、このマイコン、元々はモーター制御などに適した構成のRXマイコンだけど、普通に他の用途に使っても十分な性能で、安く、CPの高いマイコンだと思う、ただ、USBは内臓されていないので、PCとのインターフェースはシリアル通信を使う事になる。(以前に10個まとめて買ったので、まだ沢山ある、@540)
・RX、32ビットコア
・80MHz動作
・PWMタイマーなどが80MHzで駆動できる。
・256Kのプログラムメモリーと16KのRAM
※最近では、CANインターフェース付きで、プログラムメモリーが512K、RAMが32Kの製品が、ほぼ同じ価格で販売されているようだ。(@570)
モーターはステップモーターなので、32段階のマイクロステップ動作が可能なドライバーを3台購入した。(1個7ドルほどだった)
「マイクロステップ」は、元々イギリスのベンチャー企業が始めたと思うのだが、磁気回路の特性に合わせて、相に流れる電流をベクトル制御する事で、見かけの分解能を再分割する技術だ、2相のステップモーターの場合、直交するXY軸の関係なので、それぞれ、サイン、コサインの電流割合で制御する事で、理論的には、無限大に分解能を上げる事が出来る。
今回買ったドライバーは、32段階までが可能なので、1回転200ステップのモーターなので、6400パルスで1回転の制御が出来る。
モーターの定格は、3Vで3Aのようだが、それは静特性で、動特性では、回転速度が速くなる程コイルのリアクタンスにより電流が流れにくくなるため、より高い電圧が必要になる、今回のドライバーは最大40Vで3.5Aまで可能なので、丁度良いと思う。
また、モーターを動かしたり停止したりを繰り返す場合、ドライバーはチョッパー動作でそれなりの効率ではあるが、モーターに蓄えらたエネルギーを吸収する必要があり、ドライバーはかなり発熱すると思うが、それなりに大きなヒートシンクが付いている。
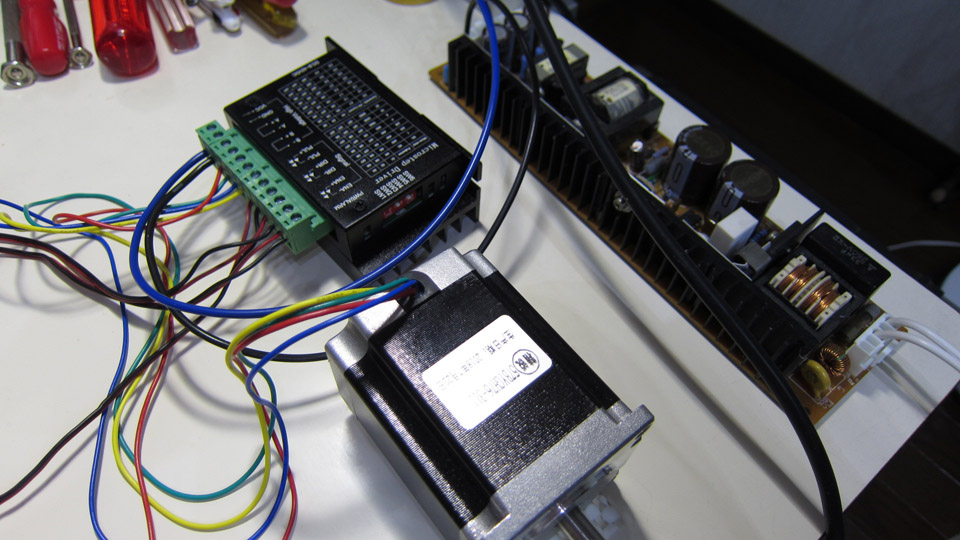
とりあえず、モーターの回転は確認出来たので、ソフトを作りこんでいこうと思う。
まず、3軸同期で直線移動などだが、一般的には「ブレゼンハム」のアルゴリズムで、ステップパルスを生成するのが相場だろうが、自分は、分数を使う事にする(結果的にはほぼ同じだが・・)。
分数の場合、分母、分子を組で管理して、単純な足し算を使って行い、1以上になったら、パルスを発生させ、分子から分母を引く、このようにすると、切捨てが起こらないので、誤差が全く発生しない。
ハードウェアーは、リミットスイッチの入力インターフェースが無いので、それも載せる必要があるが、アイソレーションに使うフォトカプラが手元に無い・・
また、スピンドルモーターの制御用出力も載せる必要がある、スピンドルモーターは、三相モーターで、インバーターで制御するが、そのままだとOn/Offしか出来ない。
回転数の制御はボリュームなので、D/A出力も必要だろうか・・(シリアル接続で、コマンドで出来れば良いのだが、このインバーターには機能が無いようだ・・・)
