自分は、以前に JR の7チャネル送受信機を買ったのだがー、マルチコプターと、ヘリコプターを購入して、受信機を買い足す必要が出てきたー
それに、マルチコプターの本格的運用では7チャネルでは少し足りない感じもする・・・
残念な事に JR の受信機だけ買い足すのも、割高な強気値段で、どうしたもんかなーと考えていたらー、9チャネル送信機が5000円!、えっ?!
そうなんですー、モジュール式の送信機だけなら海外では格安で売られているのですー、品質はそれなりなのかなーと思ったら、そんな事もなさそうだしー
JR は DMSS に対応した物を購入したのですがー、実際、センサーなどのモジュールが割高で、テレメトリーとして運用するには、かなり厳しい・・
テレメトリーのモジュールを自分で作りたいけど、プロトコルは非公開だし、リバースエンジニアリングするのも億劫だし。
C++ は非常に難しい言語なので独学では難しい側面もあり、習得には時間がかかりますが、複雑な処理を安全で判り易く記述する事が可能だと思います。
※自分は、友人のおかげでスマートに学習する事が出来ました。
C++ の場合、記述方法として「かなり強く従わせる」ような風潮があります、しかしこれには「意味」があります、多くの人はそれが自分のスタイルに合わないとか、馴染まないとか言って、避けてしまい、本当の価値を見失っている事が多々あり、誤解されている事を多くみかけます。
又、不合理で自分勝手な方法論で実装された、クズ同然のコードも多くみられます、非常に残念ですが、良い「先生」を見つける事は難しいのです。
今まで、AVRではメモリーが少ないとか、組み込みマイコンでとか、やった事無いとかなどの理由で「C」言語での開発でしたが、WinAVR で、C++ も使える事が判り、C++ に移行しています。
WinAVR では、STL は標準ではサポートしていないようですが、boost も一部使う事が出来ます、一番の問題は、メモリーが少ない点で、それさえ設計の段階で考えておけばコード効率も優れているようです。
普段のプログラムを C++ で創るのが日常的になると、C ではもはや満足出来ないところまできています(精神的)しかし良い時代です、512 バイトの RAM と 8 キロバイトの ROM を持った 8 ビットの RISC でも C++ で実装出来るのですから。
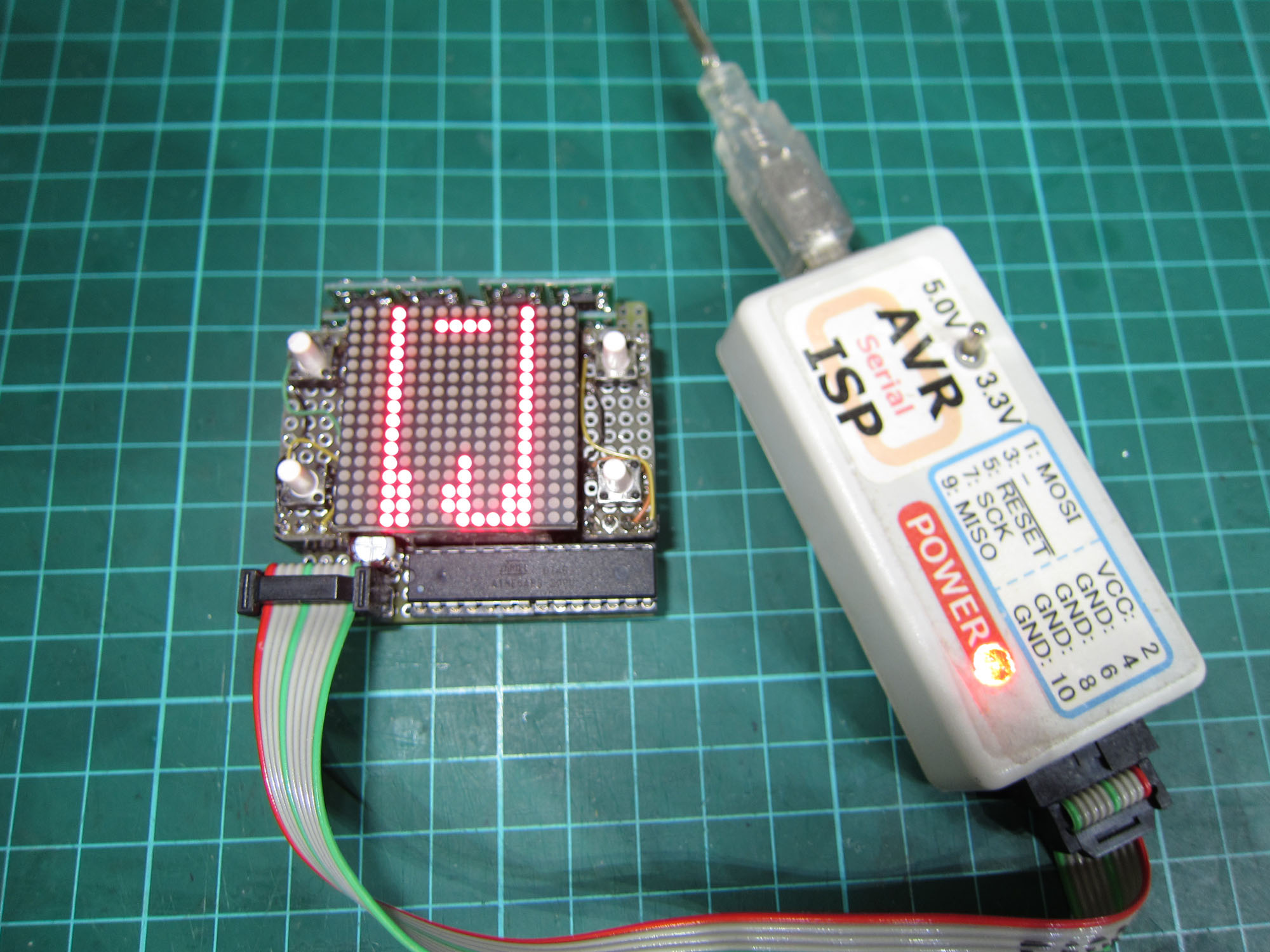
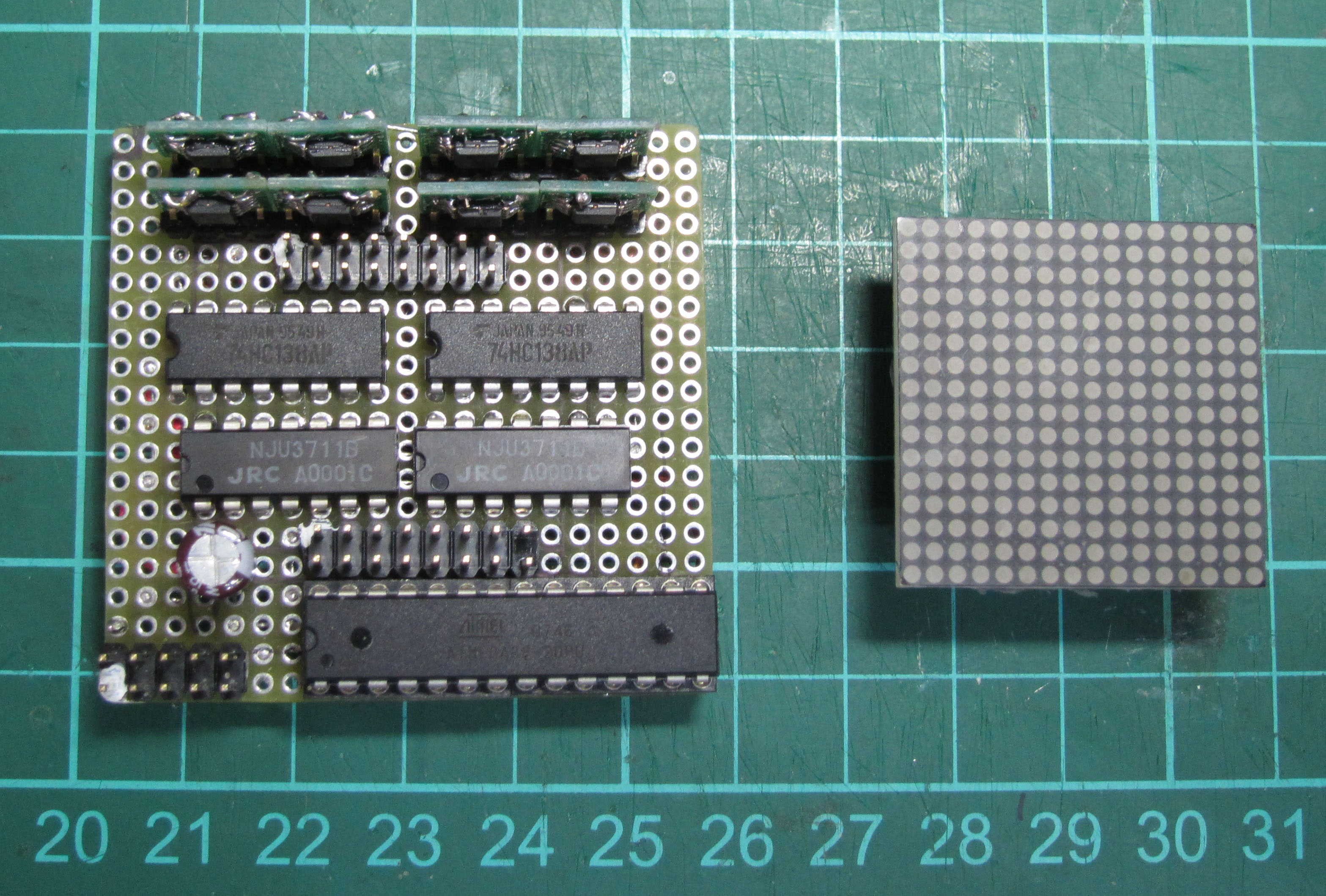
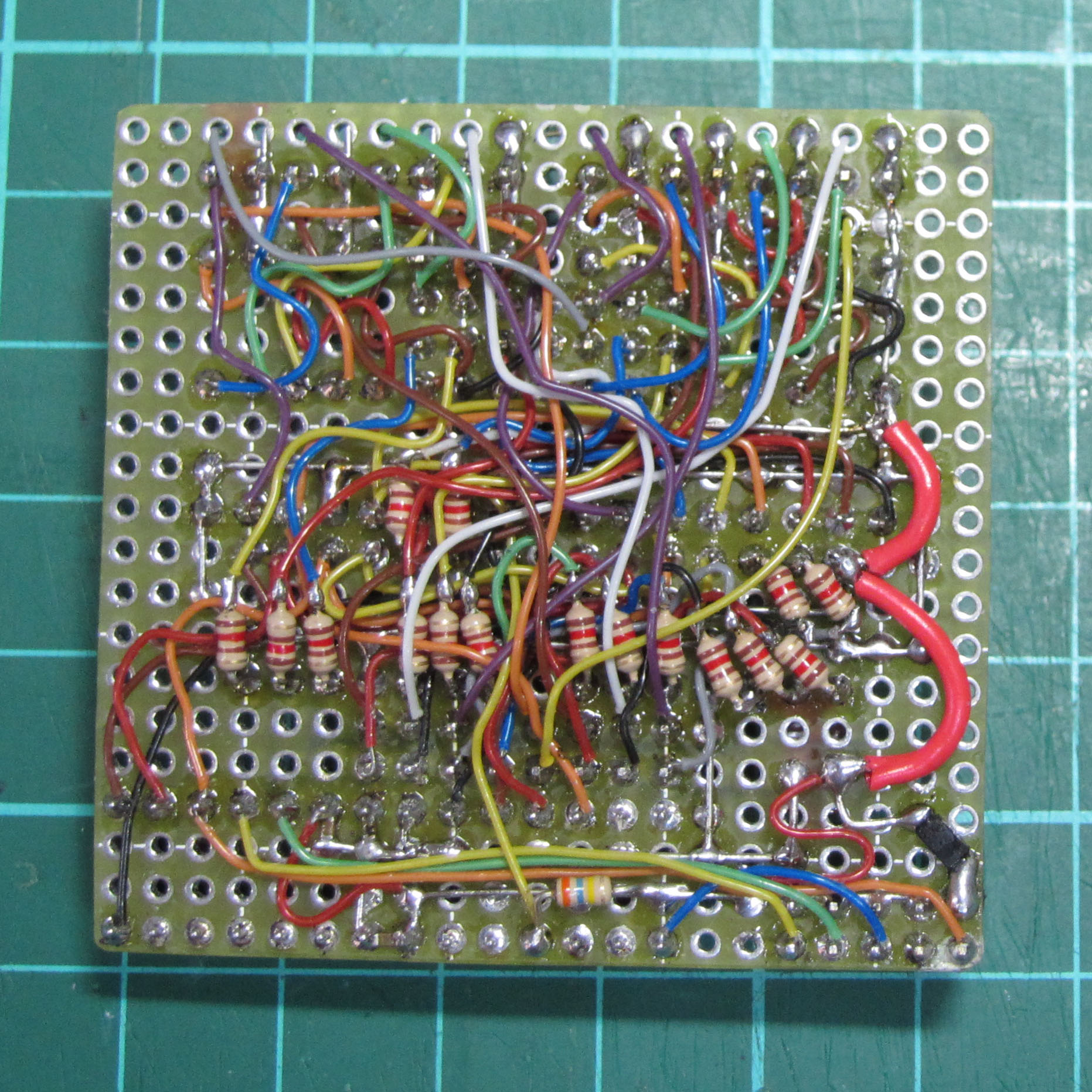
今回、ATMega88 でドットマトリックス LED を制御するに辺り、スイッチを付けたので、何か、ゲームでも作ってみたくなり、「テトリス」を作ってみました。
※バグが色々ありますがww
・開発環境の整備
まずは開発環境、ルネサスには統合環境もあるし、フリーで使えるものもある、しかし、しかしである・・・
自分はどうも IDE と呼ばれるところの統合環境があまり好きでは無い、gcc と make emacs があればそれで良いと思ってる。
エクリプスとかは最悪だと思う。
確かに、Visual Studio は、本当に良く出来ているし、デバッグ環境は素晴らしい~、しかし、常にあそこまでの環境は必要無いと思う。
※まぁ、考え方は人それぞれであるし、強制は出来ないけど~
5)コンパイルと実行
$ make
でコンパイルされ、フラッシュ書き込み用モトローラー形式のファイルが出来ます。
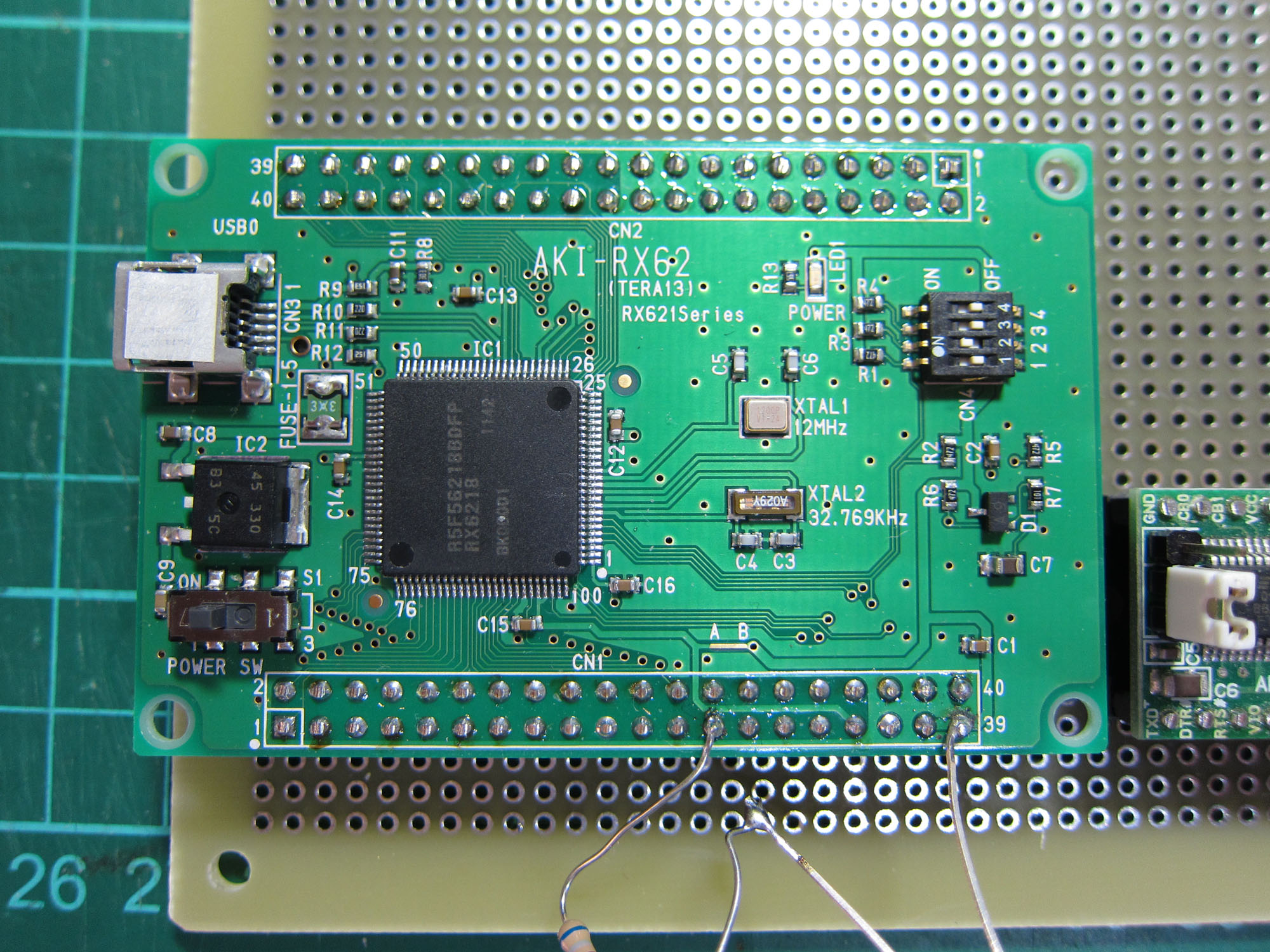
AKI-RX62 に確認用 LED(赤) をCN1、25番(P30) に接続します。
※抵抗は 680 程度
「Renesas Flash Programmer」を起動します。
AKI-RX62 は、DIP スイッチの 1(BOOT)、2(リトルエンディアン)を ON 、3、4を OFF とします。
USB ケーブルを PC と接続し、電源を入れます。
※最初に接続した時は、ドライバーのインストールなど多少時間がかかります
※ アプリケーションの設定では、USB Direct で接続し、12.0MHz、x8、x4 とします。
mot ファイルを選択して、「スタート」すれば、書き込みが開始されます。
電源を OFF にして、DIP スイッチの1(boot)を OFF にしてから電源を入れると、LED が点滅すると思います。