RX220 マイコンをサポートする
半導体不足は未だ解消の気配は無く、RXマイコンを買うにしても、以前のような価格では流通していないし、バックオーダーで、買う事も出来ない。
RX220は、機能と価格で、CPはそんなに良くないが、秋月さんで売っているので、入手はしやすいだろうと思う。
- DIPスイッチを逆に取り付けてしまったバージョンの基板なら比較的安価に購入できる。(1250円)
- 以前RX72T(200MHz、RXv3コア)が10個で@600円くらいだった事を考えると、最大32MHzでRXv1コアはあまり触手が伸びない。
- RX220はFPUも内蔵していない・・
- 既に購入済で、積みボードになっている人もいるかもしれない。
とりあえず、RXマイコン全制覇を目論んでいるし、200番台をサポートするのは、それなりに価値がある。
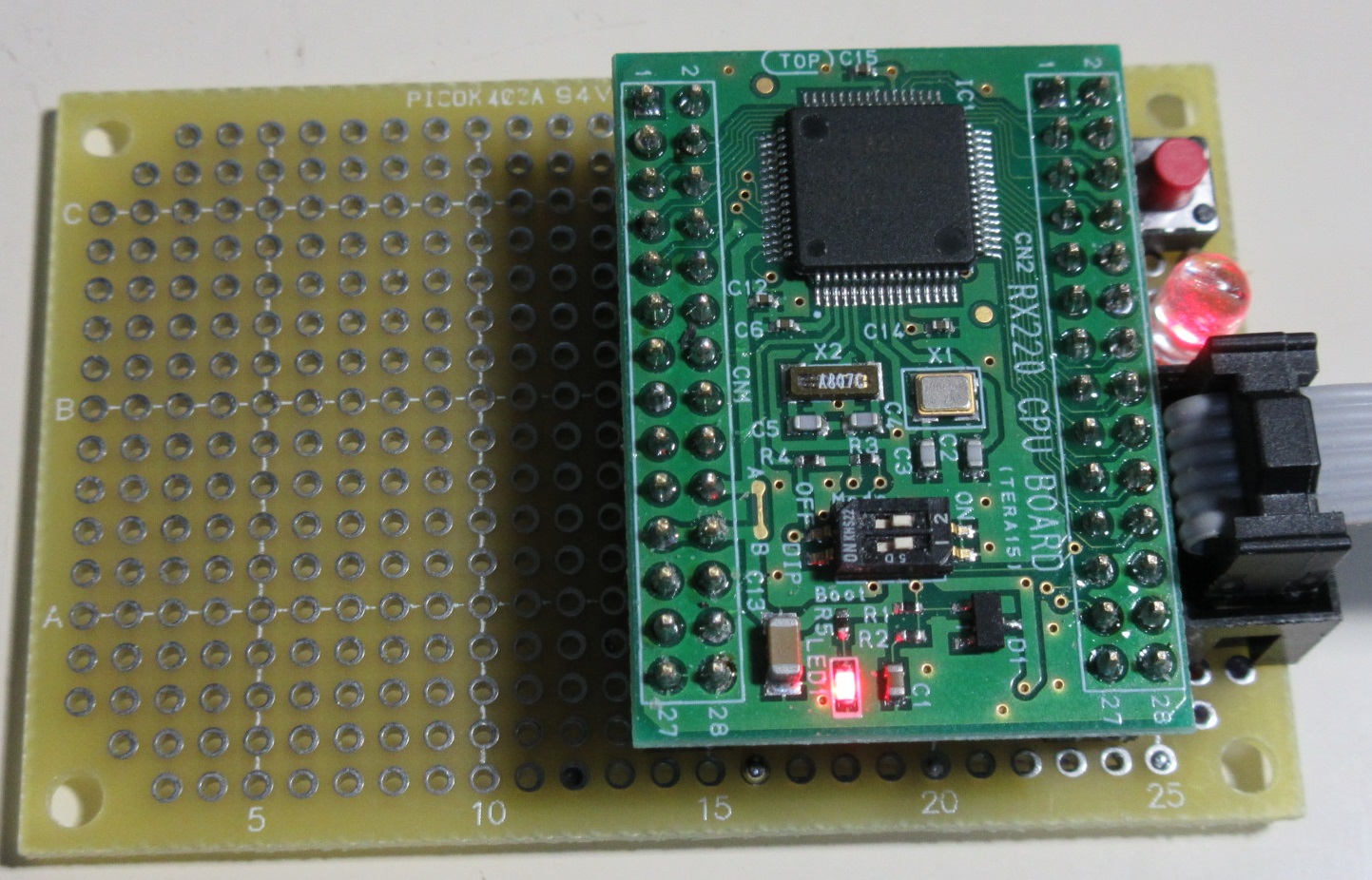
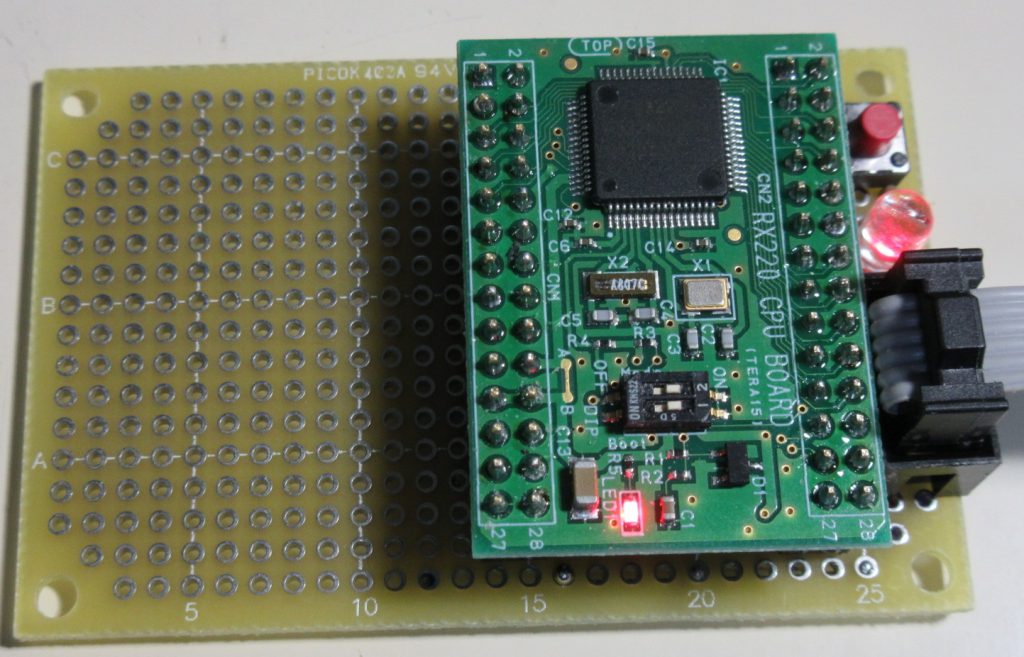
秋月RX220ボードの改造
秋月さんのRX220ボードは、そのままでは多少使いづらい・・
このボードでは、内蔵フラッシュを書き換えるには、シリアル書き込みがほぼ標準的となる。
その場合、SCI1を使う事になるが、そのままだと、RSー232Cのレベル変換ICに接続されている。
今や、PCとの通信でRSー232Cを使う事は「稀」で、FT232やCP2102NなどのUSB/シリアル変換モジュールを使って、ロジックレベルで行うのが標準的となっている。
そうすると、RXマイコンのTxDは出力なので問題無いとしても、Rxdは入力となっていて、レベル変換ICの出力が接続されているので、モジュールのロジック端子を繋ぐ事ができない。
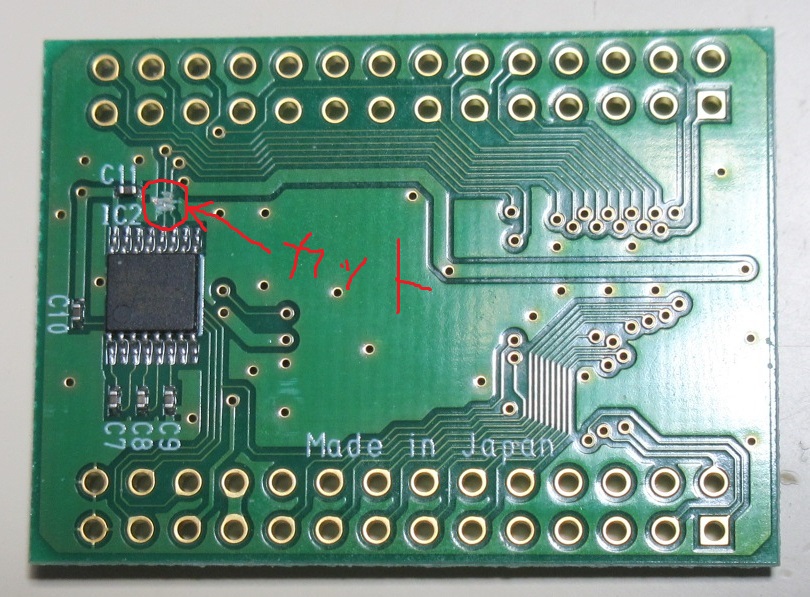
そこで、ボードのパターンをカットして、接続できるように改造した。
※何かの記事で読んだが、この「カットをする意味が判らない」と綴っている人がいた・・、これは、本当にビックリした、その程度の知識でマイコンをやってる人がいる現実に驚くばかり。
まぁ、でもマイコン掲示板で、自分で何も調べないで、いきなり質問する人や、初歩的と思えるような質問をする人、様々な人がいる現実を考えると、まぁそんなものかもしれない。
ソフトディレイの調整
RX220は最大32MHz(内蔵発振器動作)で動作する。
- クロックジェネレーターにはPLL回路が無い為、外部にクリスタルを接続して利用する場合は、最大20MHzとなる。
- クリスタルの発信器は、20MHzを超えると、ちょっと特殊な回路にしないと発振が安定しない(発振しない)ので、そうなっていると思う。
- ただ、外部クロック入力でも最大20MHzなので、その他の物理的な要因が関係しているのかもしれない。
- 内部発信器だと、正確性やジッタの問題があるとも思うが、意外と安定していると思う。
- 内部発信器は最大50MHzで発振する事も出来るので、50MHzオーバークロックで動かしてみたが、普通に動作はするようだ。
最初、1マイクロ秒のソフト遅延を行う為、NOP命令のループ回数を調整していたが、思うように調整出来ない・・・
ある値を境に、遅くなったり、速くなったり、不思議な現象が発生した。
for(uint32_t n = 0; n < device::clock_profile::DELAY_MS; ++n) {
asm("nop");
}
・・・
少し考えたら、理由は判った、今まで、最低速度は、RX24Tの80MHzだったので、ループ回数はそれなりの値で問題無かった。
しかし、32MHzだと、ループ回数は少なく、ある値を境に、「asm("nop");」が、インライン展開されてしまう。
そこで、RX220の場合は、専用のAPIにした。
static void delay_us() noexcept
{
// 定数(DELAY_MS)で指定すると、ループ数が少なくインライン展開され、予想した時間にならない為、直で’NOP’数で調整する。
if(ICLK == 32'000'000) { // 32MHz 用
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
} else if(ICLK == 20'000'000) { // 20MHz 用
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop"); asm("nop");
asm("nop"); asm("nop"); asm("nop");
} else {
for(volatile uint8_t i = 0; i < (ICLK / 1'000'000) - 10; ++i) {
asm("nop");
}
}
}
rx_prog でも、RX220をサポート
最初、とりあえずルネサスフラッシュプログラマーで書き込みを行ったが、非常に不安定で、書き込みに失敗、そもそも接続も出来ないなどのトラブルが多発した。
この原因は追究していないが、USBシリアルデバイスがCP2102Nなのが問題なのかと思った。
- CP2102Nは、FTDIより高速で、同じボーレートでも、転送にかかる遅延が非常に少ない為と思った。
- RX200系は、RXマイコン初期の物なので、あまり枯れていないのかもと思った。
- ルネサスフラッシュプログラマーの無料版は、ノークレームなので、改修を要求する事さえ出来ない。
そこで、まず、rx_prog にRX220のプロトコルを追加する事にした。
ブートモードの説明を斜め読みした感じでは、RX63Tとほぼ同じ感じで、そのまま行けると感じた。
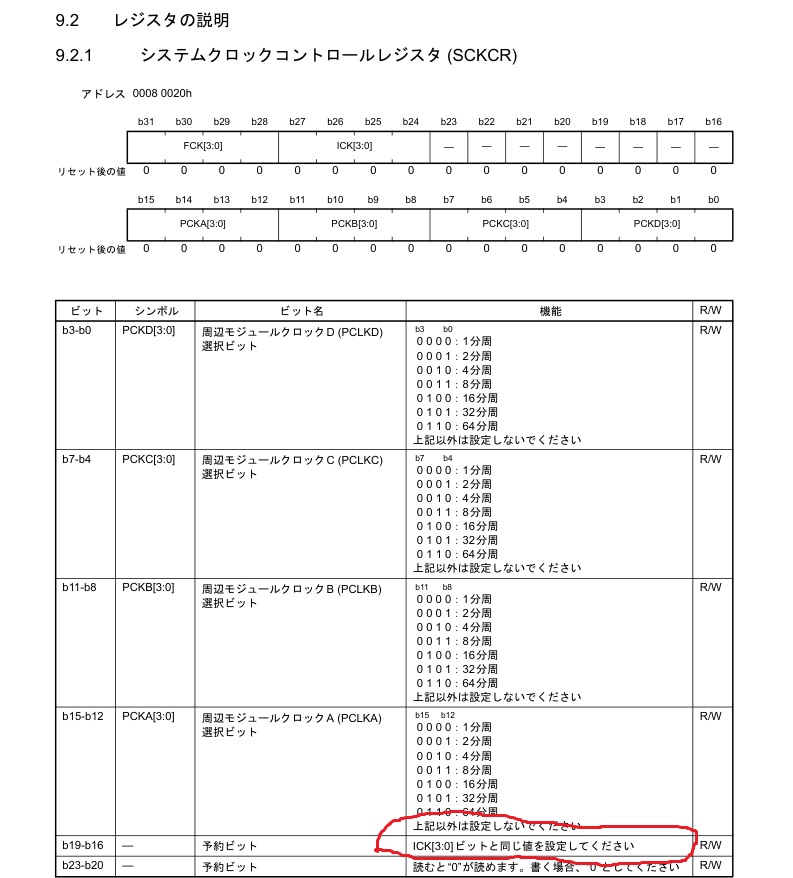
「rx_prog.conf」に、RX220 デバイスのプロファイルを追加して、「rx220_protocol.hpp」を追加、説明と照らし合わせた。
R5F52206 {
group = "RX220"
clock = 3200
divide_sys = 1
divide_ext = 1
rom = 256K
ram = 16K
data = 8K
comment = "; RX220 Flash:256K DataFlash:8K RAM:16K"
rom-area = FFFC0000,FFFFFFFF
data-area = 00100000,00101FFF
ram-area = 00000000,00003FFF
}
「rx63t_protocol.hpp」ほぼ同じでOKだったが、ファイルは別けておいた。
まず、コネクションを試してみた。
% rx_prog -d RX220 --verbose
# Platform: 'Cygwin(MSYS2)'
# Configuration file path: '/usr/local/bin/rx_prog.conf'
# Group: 'RX220'
# Serial port path: 'COM7'
# Serial port speed: 230400
# Erase Page Wait: 2000 [uS]
# Write Page Wait: 5000 [uS]
# Serial port alias: COM7 ---> /dev/ttyS6
# Serial port path: '/dev/ttyS6'
# Device: R5F52206 (first find)
# Master clock: 32.00 MHz
# ICLK multiplier: 1 (32.00 MHz)
# PCLK multiplier: 1 (32.00 MHz)
Connection OK. (RX62x)
#01/01: Device: RX200 Series (LittleEndian)
#01/01: Device ID: 0x33306A37
#01/01: Clock Mode: 0x00
#01/02: Multiplier: 1
#02/02: Multiplier: 1
#01/02: Frequency Min: 32 MHz, Max: 32 MHz
#02/02: Frequency Min: 32 MHz, Max: 32 MHz
#01/01: Change baud rate: 115200
#01/01: Boot Area: FF7FC000, FF7FFFFF
#01/01: Area: FFFC0000, FFFFFFFF
#01/26: Area: FFFFF000, FFFFFFFF
#02/26: Area: FFFFE000, FFFFEFFF
#03/26: Area: FFFFD000, FFFFDFFF
#04/26: Area: FFFFC000, FFFFCFFF
#05/26: Area: FFFFB000, FFFFBFFF
#06/26: Area: FFFFA000, FFFFAFFF
#07/26: Area: FFFF9000, FFFF9FFF
#08/26: Area: FFFF8000, FFFF8FFF
#09/26: Area: FFFF4000, FFFF7FFF
#10/26: Area: FFFF0000, FFFF3FFF
#11/26: Area: FFFEC000, FFFEFFFF
#12/26: Area: FFFE8000, FFFEBFFF
#13/26: Area: FFFE4000, FFFE7FFF
#14/26: Area: FFFE0000, FFFE3FFF
#15/26: Area: FFFDC000, FFFDFFFF
#16/26: Area: FFFD8000, FFFDBFFF
#17/26: Area: FFFD4000, FFFD7FFF
#18/26: Area: FFFD0000, FFFD3FFF
#19/26: Area: FFFCC000, FFFCFFFF
#20/26: Area: FFFC8000, FFFCBFFF
#21/26: Area: FFFC4000, FFFC7FFF
#22/26: Area: FFFC0000, FFFC3FFF
#23/26: Area: 00101800, 00101FFF
#24/26: Area: 00101000, 001017FF
#25/26: Area: 00100800, 00100FFF
#26/26: Area: 00100000, 001007FF
#01/01: Program size: 256 Bytes
#01/01: ID Protect: false
問題無い。
次に、書き込み、ベリファイも試して、問題無かった。
rx_prog は、多少書き込み速度が遅いものの、安定して書き込めるし、OS-X、Linux でも同じように動作する実績がある。
※RX220 は、OS-X、Linux では試していないけど・・
rx_prog -d RX220 --progress --write --verify sci_sample.mot
Write: #################################################
Verify: #################################################
これで、RX220を正式サポートした事になると思う。
Makefile は、以下の部分のみ異なるだけで良く、RX220 に移る事は簡単だ。
DEVICE = R5F52206
RX_DEF = SIG_RX220
まとめ
現状、サンプルプログラムは、「FIRST_sample」、「SCI_sample」のみだが、今後拡充してゆく予定。
※基本、各プロジェクトで、Makefileを用意すればOKだが、まだ、RSPIや、RIIC(I2C)ペリフェラルの追加などをしていない。
RX220 は浮動小数点を扱うとエミュレーションになってしまうが、「utils::format」の表示関係は、内部はほぼ整数を使っているし、速度以外はそれなりに使えると思う。
もう少し安価に入手できれば・・・
それでも、32ビットなので、RL78などの8ビット系に比べて大きなアドバンテージがあるのは言うまでも無い。
Start SCI (UART) sample for 'AE-RX220' 32[MHz]
SCI PCLK: 32000000 [Hz]
SCI Baud rate (set): 115200 [BPS]
Baud rate (real): 117647 (2.08 [%])
SEMR_BRME: false
SEMR_BGDM: false
CMT Timer (set): 100 [Hz]
Timer (real): 100 [Hz] (0.00 [%])
#
現在、RX631/RX63N もサポート中で、秋月ユーザーでも、C++ フレームワークを使ってみる機会がそれなりに増えると思う。
C++ に対する嫌悪感
主にC言語しか使わない人は、C++ に対する嫌悪感が半端ない事が多い。
また、C++ は判らないし、難しそうだから近寄らない人も多い。
しかしながら、マイコン初心者(プログラムの経験が全く無い人)に教える場合、C++ から始めても、そんなに敬遠したりしない事が判っている。
※もちろん、最初はあまり多くを示さないで、簡単な事、理解しやすい事、シンプルな事から始める。
むしろ、半端にプログラム出来る人より、飲み込みが速く、応用が利く人が多いように思う、これは、教え方次第のように思う。
年齢は関係無い、若い人は頭が柔らかく、吸収する力が大きいように感じる。
C++だと、コンパイラが教えてくれる事が多く、小さなミスは、ほぼ起きなくなるし、柔軟で応用範囲が広いライブラリなど、利便性が高い。
今回 RX220 をサポートしたが、アプリケーションレベルでは変更が全くなく、同じように動作する。
今後、勉強会や、講習会、YouTubeビデオなど、学べる機会や媒体を増やしていく予定でいる。