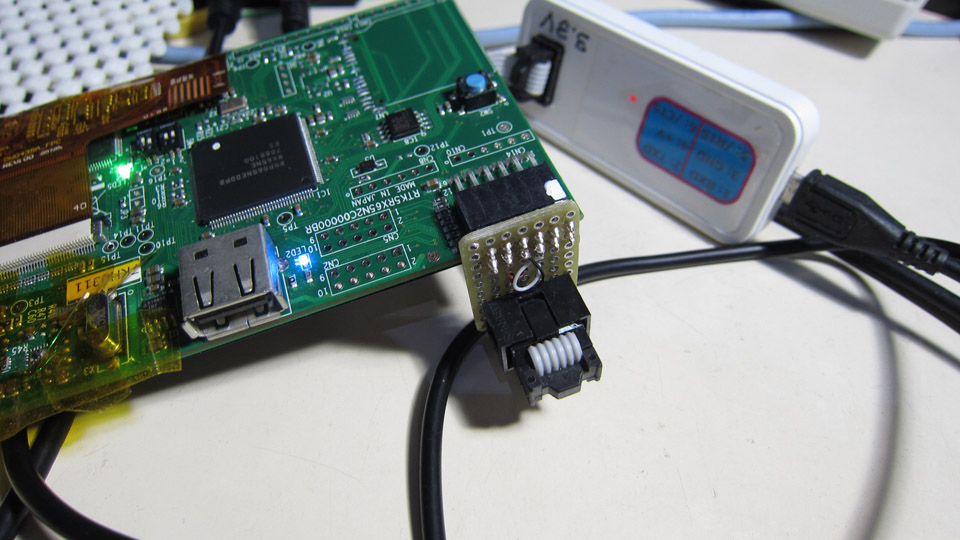
次はLCDと宣言してたが、その前に未実装部品についてまとめておきたい。
また、SDカードを使う為にカードソケットを追加で取り付けた。
このボード、未実装の部品がある。
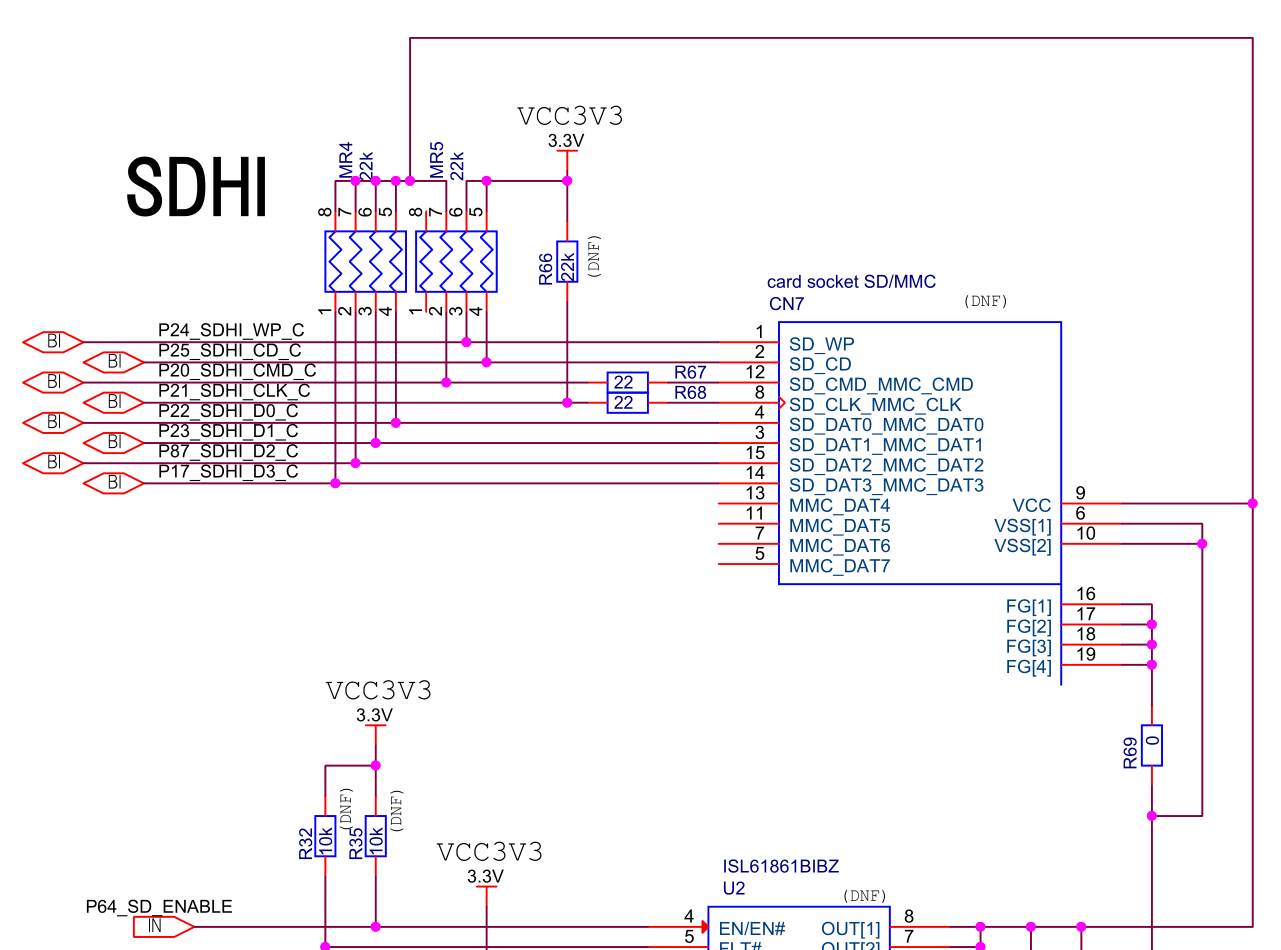
(1)SDカードソケット「SD/MMCカードソケット:101-00565-64(AMPHENOL COMMERCIAL PRODUCTS製)」
(2)SDカード電源用ゲートIC「ISL61861BIBZ」
(3)JOYスティック「SW3(JOYSTICK):SKQUDBE010(ALPS製)」
(4)イーサーネットコネクタ「RJ45_J3011G21DNL」
(5)イーサーネットPHY「LAN8720A」
※主に、上記部品で、SDカードソケット、JOYスティックは、部品が判らなかったので、
ルネサスに問い合わせをした。
もちろん、自分で部品を実装したら、保障は受けられなくなるのだが、機能があるのに使わな
いのは勿体無い。
一番困難なのは、表面実装部品で、DNFパッケージだが、これは、後々、手順などを整理し
たいと思う。(基板の実装屋さんなら簡単だと思う)
多少問題なのは、上記部品で、SDカードソケット、JOYスティックは、製造が終了してお
り、現在部品の入手が難しい。(入手できても割高になってしまう)
※代替部品を探したが、適当な物を探せなかった、また、日本では、やはり入手が困難だと思
われる。
特に、SDカードは、このような機器では必須のI/Oなので、マイクロSDカードを使って
代用させる方法を考えた。
ソケットは、秋月電子製、マイクロSDカードスロットDIP化キットを使う。
多少細かい、配線は比較的簡単ではあるが、強引な方法なのでお勧めできないのだが、他に良
い方法を思いつかない。
また、RTK5RX65Nでは、SDカードの電源をマイコンによって制御しているのだが、
電源制御につかっているIC(インターシル製)は、入手できるが割高なので、とりあえず
直接接続しておく事にする。

※自分は、「セメダイン SuperX」で、基板を接着した。
※強力両面テープでも良いかもしれない。
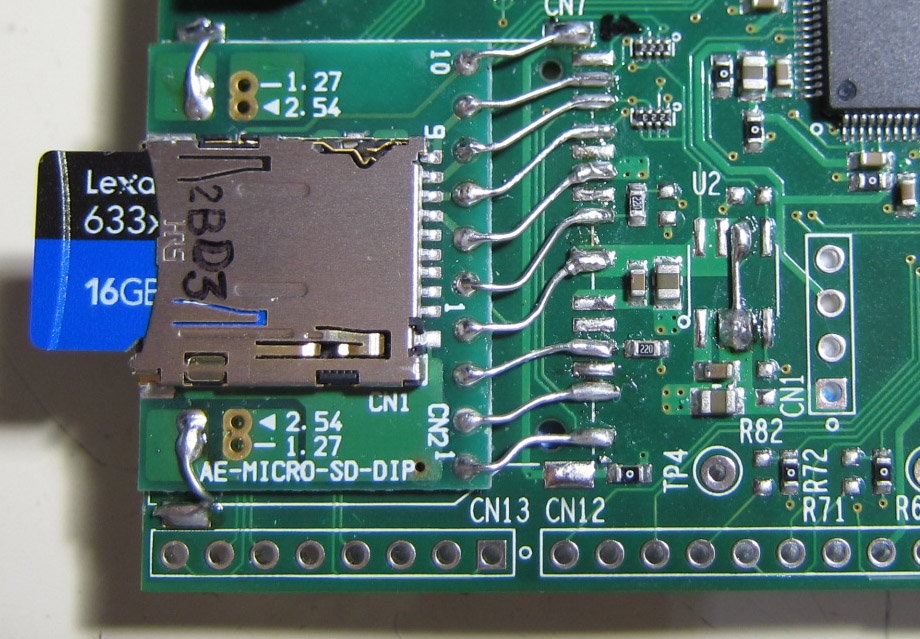
※マイクロSDには、ライトプロテクトが無いのでオープンにしてある。
※ほぼ、ストレートな結線なので配線は簡単だが、電源系は、熱が拡散するので、容量の大
きいハンダコテが必要と思う。

SDカード関係のソフトSPIでの定義
// カード電源制御は使わない場合、「device::NULL_PORT」を指定する。
// typedef device::PORT<device::PORT6, device::bitpos::B4> SDC_POWER;
typedef device::NULL_PORT SDC_POWER;
// Soft SDC 用 SPI 定義(SPI)
typedef device::PORT<device::PORT2, device::bitpos::B2> MISO; // DAT0
typedef device::PORT<device::PORT2, device::bitpos::B0> MOSI; // CMD
typedef device::PORT<device::PORT2, device::bitpos::B1> SPCK; // CLK
typedef device::spi_io2<MISO, MOSI, SPCK> SPI; // Soft SPI 定義
typedef device::PORT<device::PORT1, device::bitpos::B7> SDC_SELECT; // DAT3 カード選択信号
typedef device::PORT<device::PORT2, device::bitpos::B5> SDC_DETECT; // CD カード検出
typedef fatfs::mmc_io<SPI, SDC_SELECT, SDC_POWER, SDC_DETECT> MMC; // ハードウェアー定義
MMC sdh_(spi_, 20000000);
-----
以前に自作のRX64Mボードで、SDHIのドライバーを実装しようと、色々やったが、
どうやっても動作せず、また、ルネサスのサンプルも無いようだったので、あきらめていた。
だが、よくよく調べると、RX64Mマイコンには、SDHIインターフェース内臓版と、そう
では無いバージョンがある事がわかった。
実験で使ったデバイス「R5F64MFCFDC」は、SDHIは「無し」なので動くハズは
無い。
※SDHIインターフェースのバージョンを取得するレジスターは読めて、それらしい値だった
ので、てっきりSDHIがあるものと思っていた。
RTK5R65NボードのRXマイコン「R5F565NEDDFB」は、SDHI「あり」の
デバイスなので、SDHIインターフェースを使ってSDカードのアクセスを行う事が出来る。
4ビットモードを製品として使う場合は、SDアソシエーションとのライセンス締結が必要なよ
うだが、自分がリリースしているテンプレートドライバー、フレームワークは無保証なので、こ
れらには関知しない。
※SDHIには、ライセンスが必要無い1ビットモードもある。
現在、SDHIドライバーは開発中であり、とりあえず、動作確認の為、SPIのソフトウェア
SPIドライバーを使って、動作を確認してある。
RTK5 SD カードアクセス、サンプル